
|
Ich betreibe nun schon geraume Zeit mehrere kleine Solarmodule
(3x ca. 7Wp, 1x ca. 3Wp, 1x 2Wp) auf meinem Balkon. Die Anschlüsse der
Module enden an Laborbuchsen (4mm) in meinem Shack, damit die einzelnen
Module für verschiedene Experimente mit Spannungswandlern,
Ladeschaltungen u.a. verfügbar/konfigurierbar sind.
Ausserhalb der "Experimentierzeiten" sind die Module mit verschiedenen
Spannungswandlern und Akkus (1-50Ah) verbunden. Auf diesem Weg habe ich
bereits die Beleuchtung meines Arbeitstisches und den gelegentlichen
(QRP-) Funkbetrieb komplett auf "autarke Solarversorgung" umgestellt.
Im Winter (→mangelnde Solarenergie) muss ich meine Funkaktivität ein wenig
einschränken, damit ich abends noch basteln kann (→ Beleuchtung), aber
bereits ab etwa März sind die Akkus wieder "gut gefüllt".
Jedoch ist mir z.Zt. unbekannt, welches Modul unter welchen Umständen
wieviel Energie zum Laden des aktuell angeschlossenen Akkus geliefert hat.
Ist die (handgesteckte) Verteilung der Solarzellen auf die verschiedenen
Akkus/Ladegeräte optimal, oder liesse sich mit einer anderen
Verschaltung mehr Solarenergie "lagern"?
Ausserdem ist mir (im Sommer) aufgefallen, daß sich die Leistungsabgabe
eines Moduls durch Kühlung (z.B. Besprühen mit Wasser) deutlich
steigern lässt. Und welchen Einfluß hat eigentlich eine dünne
(1-3mm) Schneeschicht auf dem Modul? Ist es sinnvoll, die Schicht (mit
entsprechendem Arbeitsaufwand) zu entfernen, oder steut die Schicht genug
Licht, daß der (sowieso miese) Wirkungsgrad kaum verringert wird?
Um diese Fragen zu klären, benötigte ich eine Einrichtung, die mir
außer der Modulspannung auch noch Werte für den entnommenen Strom
und die aktuelle Modultemperatur (und vielleicht noch mehr Informationen)
liefern kann
|

|
Überlegungen zur Konstruktion
|
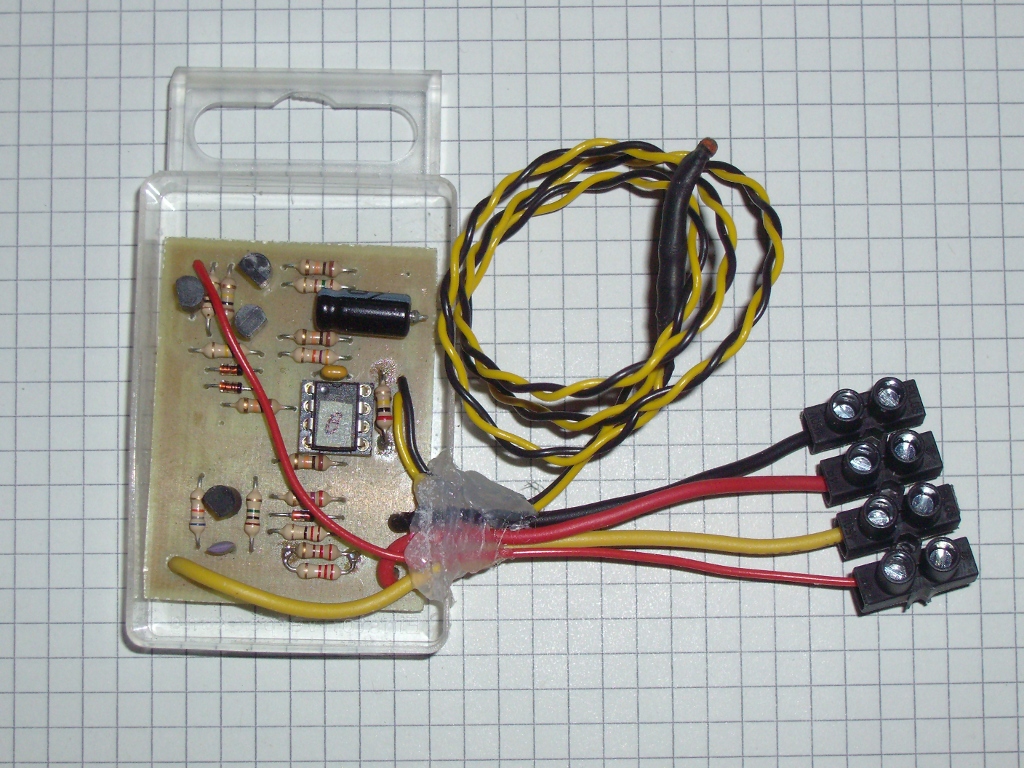
Da u.a. auch die Modultemperatur gemessen werden soll, ist es sicher sinnvoll,
den "Messkopf" direkt am Modul zu montieren (→Vermeidung von
langen Leitungen zum Temperaturfühler). Zur Messung bietet sich ein
PIC12F675
an, der die benötigten A/D-Wandler bereits enthält. Da auch
nicht nur an einem Modul gemessen werden soll, und sich die Anzahl der
Leitungen auch in Grenzen halten sollte, bietet sich ein System mit einem
"Kommunikationsbus" an, an dem bei Bedarf auch weitere Module
angeschlossen werden können.
|
Konzept eines "Kommunikationsbusses"
|
Um möglichst wenige zusätzliche Leitungen verlegen zu müssen,
sollte die Übertragung der Messdaten seriell erfolgen, wobei die
Möglichkeit gegeben sein sollte, auch mehrere Messköpfe
an einer Leitung anzuschliessen →"One-Wire-Bus". Die sich
dadurch ergebende Möglichkeit von Datenkollisionen sollte sich durch
verschiedene Maßnahmen verhindern lassen: Entweder es wird ein striktes
Master/Slave-Protokoll verwendet (ein Controller fragt die Module der Reihe
nach ab), oder die einzelnen Module haben die Möglichkeit, Kollisionen
zu vermeiden und zu erkennen (CSMA/CD-Verfahren).
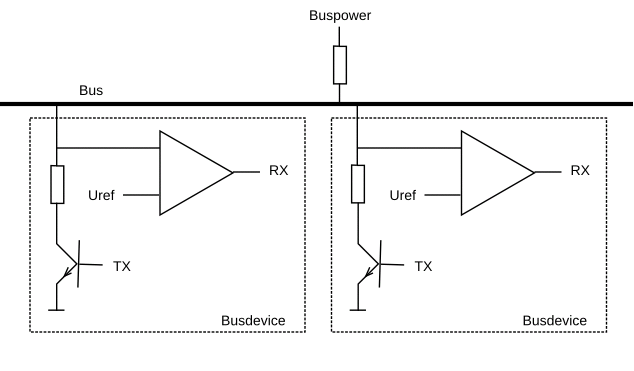
Letztere Möglichkeit ist bei der nebenstehenden Prinzipskizze durch die
separaten Signale TX (Senden) und RX (Empfangen) gegeben, da der Controller so
auch während seiner Sendung mit Hilfe des RX-Signals prüfen kann, ob der zu
sendende Pegel auch wirklich auf dem Bus anliegt. Ist dieses nicht der Fall,
sendet gleichzeitig auch ein anders Busdevice, es wird eine Kollision erkannt,
signalisiert, und nach einer (sich dauernd -möglichst "zufällig"-
ändernden) Wartezeit kann erneuter Sendeversuch unternommen werden. Um die
Datenleitung gleichzeitig als Stromversorung verwenden zu können (s.u.),
erfolgt die Datenübertragung durch eine Spannungsabsenkung (Lastmodulation)
auf 70-80%. Von den für solche Anforderungen "gängigen"
Verfahren (z.B. KNX)
nehme ich aufgrund der Patentierung/Kosten und ggf. rechtlichen Problemen lieber
Abstand, und entwickle lieber etwas "Eigenes"...
|
|
Stromversorgung
|
Da die Menge der zu übertragenden Daten recht gering ist (10-20 Byte
sollten für einen kompletten Satz von Messwerten ausreichen), und
der Abstand zwischen zwei Messungen durchaus mehrere Sekunden betragen darf,
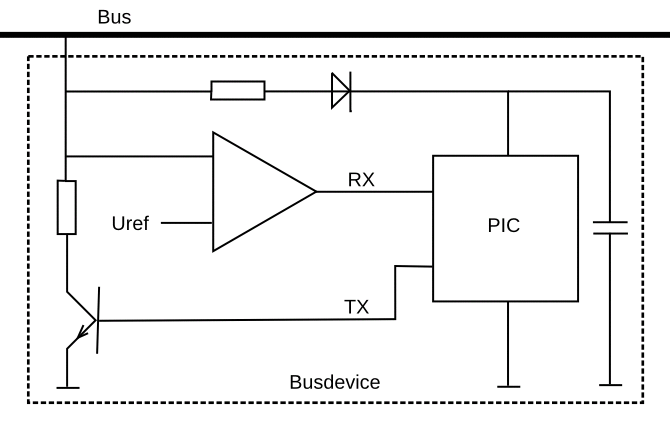
bietet es sich an, die Kommunikationsleitung auch gleichzeitig zur
Stromversorgung zu verwenden: Die einzelnen Messköpfe puffern die
Betriebsspannung mit Kondensatoren entsprechender Grösse, sodaß
die Controller auch während der Kommunikation mit Spannung versorgt werden.
Der einzige Haken an diesem Verfahren ist jedoch, daß die Betriebsspannung
des Controllers auch als Referenzspannung für die A/D-Wandler verwendet
wird. Die Referenz der Wandler könnte auch als eine Referenzspannungsquelle
realisiert werden, nur das "kostet" einerseits einen Portpin,
andererseits auch mehr Strom, als mein ganzer Messkopf benötigt (ca.500µA)...
Daher darf eine Messung nur vorgenommen werden, wenn die letzte
Datenübertragung lange genug her ist, sodaß die Kondensatoren
vollständig geladen sind und eine verlässliche Betriebsspannung
zur Verfügung stellen. Dieser kleine Nachteil lässt sich jedoch
"per Software ausbügeln", und stellt somit keinen Vergleich
zu dem großen Vorteil dar, das gesamte System mit nur einer Leitung
(und der Systemmasse) zu betreiben.
|
Messung der Modulspannung und des Modulstromes
|
Die Bereitstellung der zu messenden Solarmodulspannung für die
A/D-Wandler ist ja nicht weiter kompliziert → Spannungsteiler.
Jedoch eine Spannung zu erzeugen, die vom Modulstrom abhängig ist, und
im Messbereich des Wandlers liegt, ist schon ein wenig aufwändiger... Ein Shunt
in der Masseleitung würde zwar eine Spannung im Messbereich des A/D-Wandlers
erzeugen, nur eine solche Konstruktion ist einfach "häßlich",
da damit die Systemmasse nicht mehr klar definiert ist. Es muss also der Strom
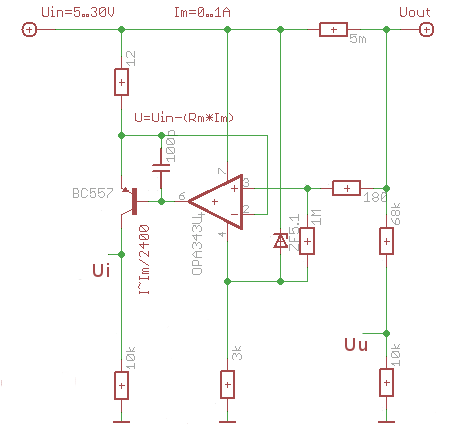
in der Ausgangsleitung des Solarmoduls gemessen werden. Nur leider liegt diese
Leitung auf einem Potential, welches sich meist ausserhalb des Messbereichs des
A/D-Wandlers befindet. An dieser Stelle ist also ein wenig Elektronik
(u.a. ein "Rail-To-Rail-OpAmp") erforderlich... Diese Schaltung
steuert eine Konstantstromquelle so, daß ein dem zu messenden Strom
proportionaler Strom durch einen Widerstand gegen Masse fließt,
wobei der Spannungsabfall daran dem Messtrom proportional ist. Die Versorgung
dieser Teilschaltung erfolgt aus dem Solarmodul, um die Belastung des Datenbusses
nicht unnötig zu erhöhen. Daraus ergibt sich zwar der Nachteil, daß
der Messkopf erst ab ca.5-6V Solarspannung einigermaßen brauchbare
Messwerte für den Strom liefert, aber es ist ja auch etwas sinnlos, einen
Solarstrom messen zu wollen, wenn keine Spannung von dem Modul geliefert wird.
Daher wird auch hier wieder "durch Software ausgebügelt" →
Liegt die Modulspannung unter 5V, wird auf die Strommessung verzichtet, und als
Messwert Null geliefert.
|
|
Messung der Temperatur

|
Die Bereitstellung einer Spannung, die proportional zur Temperatur
ist, sollte eigentlich mit Hilfe eines NTC recht einfach ein. Nur leider
sind die Widerstandswerte eines NTC (und damit auch die Spannung an einem
entsprechenden Spannungsteiler) nicht so sonderlich linear zur Temperatur. Nach
dem eingehenden Studium entsprechender Datenblätter (und etlichen
Messungen/Versuchen/Berechnungen) wurde klar, daß die Linearisierung
der Temperaturkurve schon ein wenig mehr "Rechenarbeit" (ein
kubisches Polynom sollte für eine Genauigkeit von ca. 0.2°C ausreichen)
notwendig wird... Solche Berechnungen auf einem 8bittigen Controller (mit
wenig Speicher) auszuführen, bedarf schon einer gewissen Menge an
"Hirnschmalz" (zumal ich aus Timinggründen die Dinger
ausschliesslich in Assembler programmiere), aber dafür muß es
nur einmal geschrieben werden. Die Verwendung von entsprechenden
(linearisierten) Temperaturfühlern würde Kosten bei jedem
aufgebauten Messkopf verursachen...
|
Die ersten Messungen mit dem Prototypen
|
Nachdem ich den ersten Prototypen eines Messkopfes und einen Wandler
"One-Wire-Bus/RS232" aufgebaut hatte, konnte ich damit die
ersten Messungen ausführen. Das Programm im Messkopf ermittelte/berechnete
die Messwerte, und gab sie alle paar Sekunden als ASCII auf dem Bus aus.
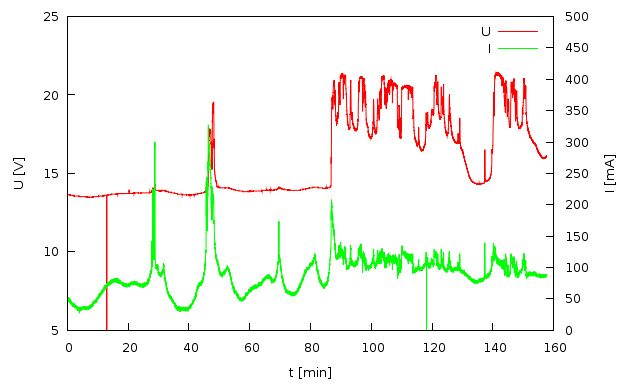
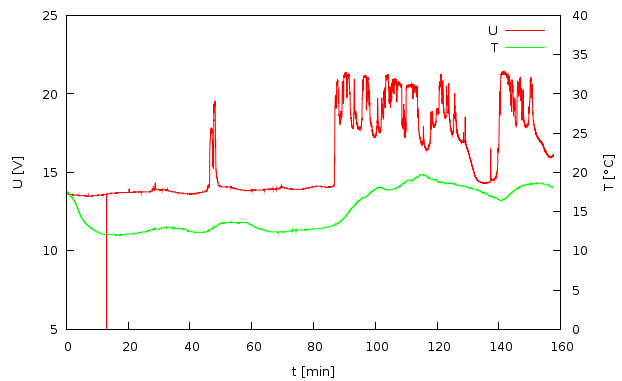
Die nebenstehenden Diagramme zeigen die aufbereiteten Messdaten von 13.4.2013,
ca.13:00. Sehr schön zu erkennen ist das Ansprechen des Ladereglers etwa
in der Mitte der Diagramme: Der angeschlossene Akkumulator hat seine maximale
Ladespannung erreicht, der Regler begrenzt den Ladestrom, und die Spannung am
Solarmodul steigt. Die kurzen Einbrüche der Modulspannung und des Stromes
rühren von Vergleichsmessungen mittels eines Multimeters, wobei u.a. die
Verbindungsleitungen kurz zum Anschluß eines Amperemeters unterbrochen
wurde. Auch die Verzögerung der Modultemperatur gegenüber der
Ausgangsleistung/Beleuchtungsstärke ist gut zu erkennen.
Nur was nutzt mir das? Ich kann damit sehen, daß mein Messkopf
anscheinend einigermaßen funktioniert, nur ich benötige immer
einen laufenden PC, um die aktuellen Daten zu sehen. Für Aufzeichnungen
(zur Erstellung von zeitlichen Diagrammen) ist das zwar ganz brauchbar, nur
ein PC "frißt" wesentlich mehr Leistung, als meine
Solarzellen hergeben... Ok, ich könnte einen "Scheckkartenrechner"
verwenden, aber ein "einfacher, stromsparender" Überblick
über den aktuellen Zustand wäre mir lieber... → Ein einfaches
Display muss her... Aber so Etwas habe ich doch schon ein mal (für
andere Zwecke) gebaut?
|
|
|
Das Display-Modul
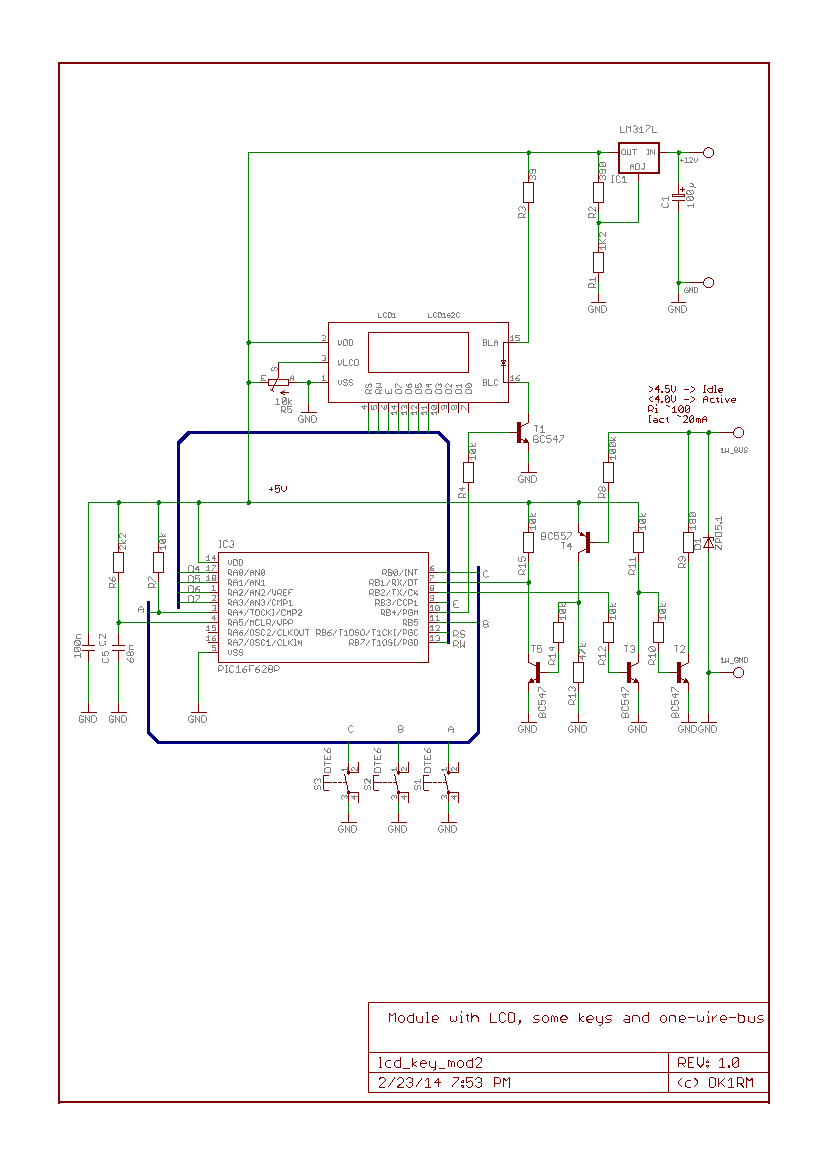
|
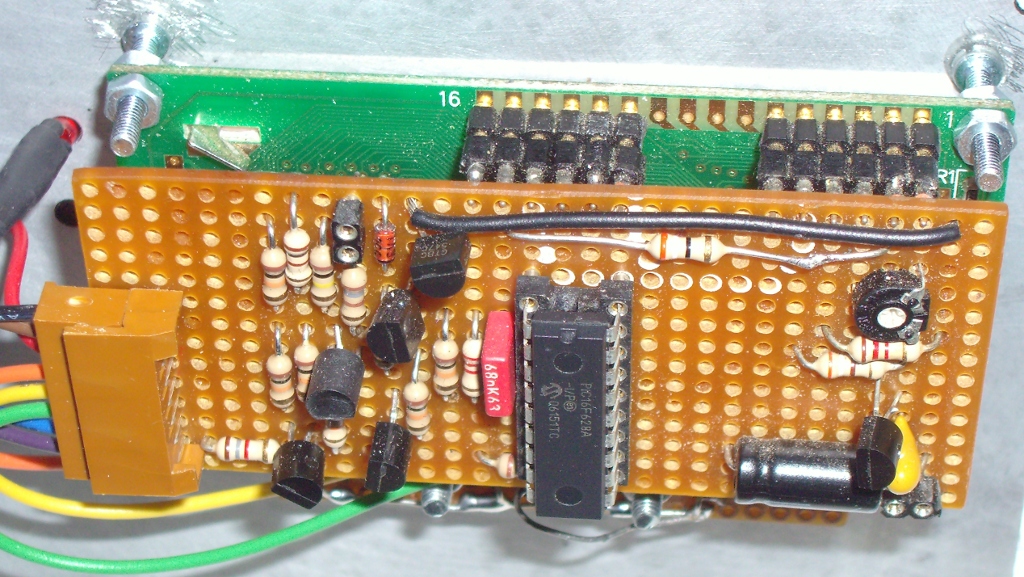
Also habe ich mein I2C-Display noch einmal
in Eagle neu aufgelegt, diesmal jedoch mit einem Interface für meinen
"Eindrahtbus", und einem etwas größeren Controller
(PIC16F628A).
Die Arbeit der Erstellung eines Layouts und einer Leiterplatte habe ich
mir dieses Mal gespart, und das Display auf Lochraster aufgebaut.
Nun zeigte mir das Display drei Zahlen (Spannung, Strom, und Temperatur)
in der oberen Zeile an. "Nett", aber irgendwie auch nicht so
sonderlich "schön". Eine Anzeige mit Masseinheiten (V, mA,
und °C) wäre da schon angebracht, vielleicht auch noch die
Anzeige der aktuellen Leistung,... Und ausserdem sollten ja auch noch
weitere Messköpfe an dem Bus angeschlossen werden...
Dabei hätte jeder Messkopf die "ASCII-Aufbereitung" vornehmen
müssen, was irgendwie nicht in den Aufgabenbereich einer Messapparatur
gehört. Solche Funktionalität gehört eher in das Display,
oder (noch besser) in einen weiteren Controller.
So entstand im Laufe der Zeit das Konzept eines komplett eigenständigen
Protokolls für "meinen" Bus, welches auf Datenblöcken mit
Adressen, Befehlen, Daten und Statuscodes basierte. Jedes Gerät am Bus
bekam eine Adresse, über die es angesprochen werden kann. Und jeder Typ von
Busdevices (Messkopf, Display,...) kennt eine gewisse Anzahl von Befehlen, und
"antwortet" darauf mit einem Datenblock. So bekam z.B. das Display
Befehle zur formatierten Darstellung von Binärdaten oder Zeichen. Nur
"Irgendwer" musste nun die Pakete mit den Befehlen und Daten auch
versenden...
|
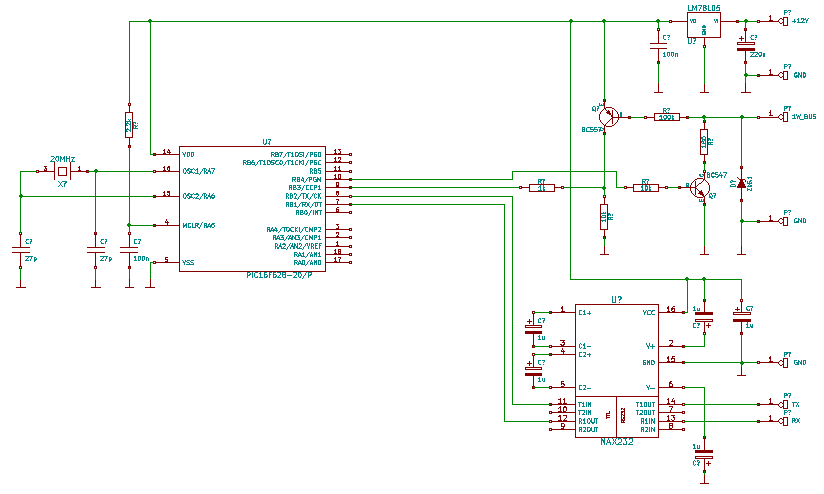
Der "Buscontroller"
|
In der ersten Ausbaustufe sollte die Steuerung von einem PC vorgenommen
werden. Also entwickelte ich ein weiteres Board mit einem Businterface
und einer seriellen Schnittstelle, um vom PC her auf den Bus zugreifen
zu können. Dieses Mal verwendete einen
PIC16F628,
einen
MAX232,
und
KiCad
zur Schaltplanerstellung. Der Aufbau erfolgte wieder auf Lochrasterkarte.
Ein entsprechendes Programm im PC ermöglichte es mir nun, beliebige
Datenpakete auf dem Bus an die verschiedenen Devices zu senden, mir die
entsprechenden "Antworten" anzusehen, und die Aktivität auf
dem Bus zu überwachen. Diese Funktionalität erwies sich als sehr
nützlich, um ein entsprechendes Steuerprogram für die spätere
"Eigenständigkeit" des Buscontrollers zu entwickeln.
Nach geraumer Zeit konnte der Buscontroller "Opcodes" aus seinem
EEPROM lesen, Datenpakete senden und empfangen, selber Daten modifizieren,
und auf "Events" (z.B. eine Tastenbetätigung am Display, die
das Displaymodul durch Aussendung eines entsprechenden Datenpaketes auf
dem Bus signalisiert) reagieren. Natürlich erfuhren dabei auch die
Programme in den Messköpfen und dem Display ständig Erweiterungen.
|
|
Erweiterung des Messkopfes
|
Im Zuge der Programmierung des Buscontrollers hat auch der Messkopf einige
Erweiterungen erhalten. Aus der gemessenen Spannung und dem gemessenen
Strom wird nun auch die aktuelle Leistung berechnet, und zusätzlich
über die Zeit aufaddiert. Somit steht auch ein Wert für die
insgesamt abgegebene Leistung (seit dem letzten Start/Reset) zur
Verfügung. Auch der seit der ersten Entwicklungsphase (zum "Debugging"
sehr nützliche) herausgeführte "Testpin" hat eine neue
Anwendung gefunden: Mit diesem Pin/Port kann nun mit Hilfe eines Transistors
ein 1kΩ-Widerstand an den Solarspannungsausgang des Moduls gelegt
werden. Wird dieser Ausgang nach der ersten Messung von Spannung und Strom
(für ein paar µS) aktiviert, und eine erneute Messung von Spannung und
Strom vorgenommen, kann durch Vergleich der beiden dabei ermittelten
Leistungswerte die Richtung zum
Leistungsmaximum
des Solarmoduls ermittelt werden. Diese Information kann ebenfalls bei dem
Messkopf angefagt werden, und könnte bei der zukünftigen
Entwicklung von Ladereglern (die ebenfalls an den Bus angeschlossen werden)
sehr nützlich werden...
|
Die Stromversorgung
|
Nachdem ich nun die "Baustellen" in einen "einigermaßen
brauchbaren" Zustand gebracht hatte, wurde es Zeit, sich Gedanken
über eine "autarke" Stromversorgung zu machen.
Was liegt bei diesem Projekt näher, als zur Versorgung der einzelnen
Schaltungen gleich die Solarzellen zu verwenden? Bei dieser schwankenden
Versorgung ist jedoch ein Puffer zur Überbrückung der
"Dunkelzeiten" notwendig. Eine kurze Messung ergab, daß
Buscontroller, RS232-Interface, Display (ohne Beleuchtung), und (aktuell
drei) Messköpfe ca.30mA benötigen, die Displaybeleuchtung
zusätzlich noch ein mal ca.30mA. Damit sollte ca. 1Ah (bei Verzicht
auf eine dauernde Beleuchtung des LCDs) für mehr als einen Tag
ausreichen. Ein entsprechender Bleigelakku passte jedoch nicht mehr mit
in das vorgesehene Gehäuse, und mit 12V zu puffern ist bei einem
Betrieb mit 5V-Linearreglern auch nicht so besonders effektiv... Dann
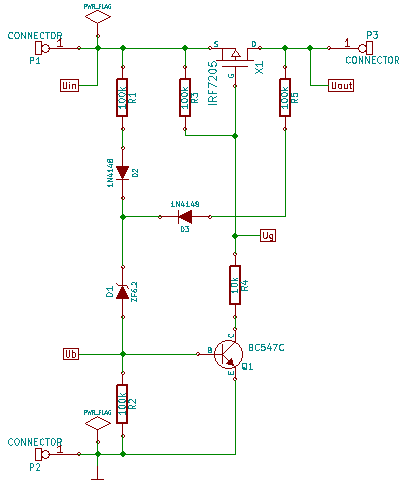
fielen mir jedoch zwei LiIon-Zellen mit ca. 2Ah (aus einem Notebook-Akku
ausgeschlachtet) in die Hände. Da die minimale, für die Spannungsregler
auf den Baugruppen notwendige Spannung knapp 7V beträgt, kann ich die
Zellen zwar nicht ganz bis auf 3V pro Zelle entladen, aber trotzdem sollte
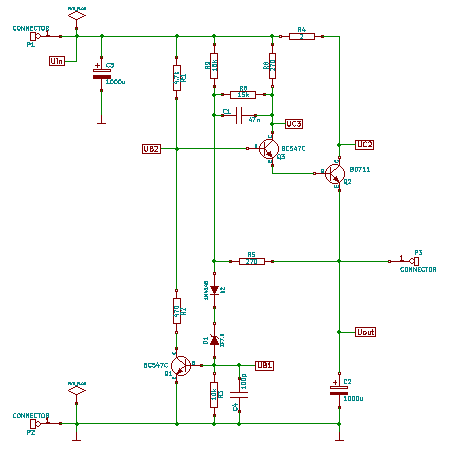
die Kapazität der Zellen ausreichen. Also entwickelte ich fluchs
einen Laderegler (nach einem Schaltungsbeispiel von 1967, welches ich für
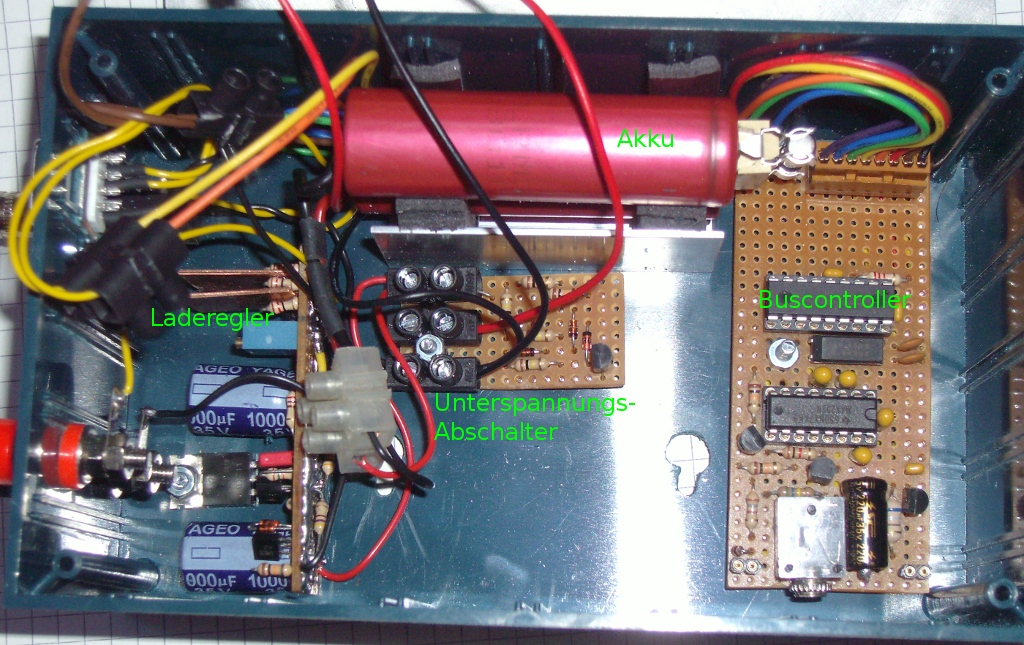
meinen Bedarf modifizierte) und eine Unterspannungsabschaltung. Der Laderegler,
der eine Spannung von 8.3V für den "internen Puffer"
bereitstellt, zeigte schon bei den ersten Versuchen einen sehr nützlichen
Effekt: Wenn die Solarzellen morgens anfangen, Energie zu liefern, wird die
gesamte Energie zuerst einmal zum Laden des Puffers verwendet. Dadurch
reduziert sich die Solarspannung auf maximal 10.5V. Mit dieser Spannung
arbeiten jedoch die parallel angeschlossenen Laderegler für 12V-Akkus
noch nicht. Erst wenn der interne Akku kaum noch mehr Strom aufnimmt,
erhöht sich die Spannung, und die anderen Laderegler fangen an, zu
arbeiten. Damit ist gewährleistet, daß immer zuerst der interne Akku
geladen wird.
|
|
|
Und nun "Alle zusammen..."
|
Da nun alle Einzelteile vorlagen, wurde Alles (mit Ausnahme der Messköpfe)
in ein Gehäuse verfrachtet, verkabelt, und mit den notwendigen
Steckverbindern zur "Außenwelt" versehen.
|
|
|
|

|

|
Erste Versuche mit dem System
|
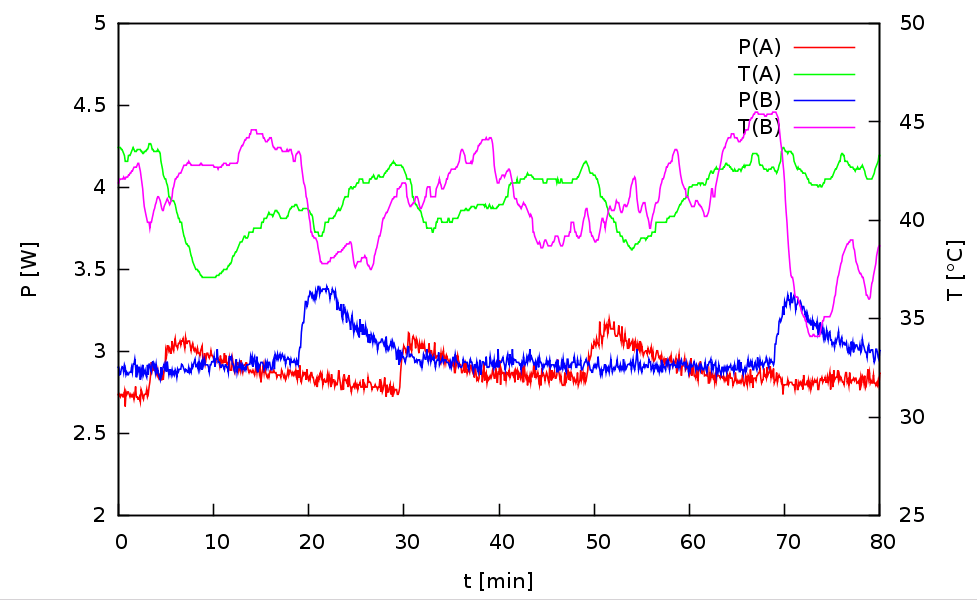
Wie schon im allerersten Absatz angesprochen, interessiert mich insbesondere
der Zusammenhang zwischen der Modultemperatur und der abgegebenen Leistung.
Da es am 21. und 22.5.14 zwar bewölkt, aber recht warm war, habe ich (mit
Hilfe der seriellen Schnittstelle und eines Aufzeichnungsprogramms auf meinem
PC) die von den Messköpfen ermittelten Daten in eine Datei schreiben lassen.
Dazu wurde das "Programm" im Buscontroller (holt Daten von den
Messköpfen, und sendet sie zum Display) per RS232-Befehl abgeschaltet,
und die Kontrolle des Busses vom Programm im PC übernommen. Während die
Aufzeichnung lief, habe ich Wasser mittels einer Blumenspritze auf die Solarmodule
"geplempert" (jeweils ca.30-50ml über 1-2Minuten), sodaß
kaum noch Wasser am unteren Rand des Moduls ankam, weil der Großteil
davon schon auf dem Wege verdampft war. Dummerweise hatte ich beim ersten
Versuch alle Module gekühlt, sodaß ich in den aufgezeichneten
Daten nur schwerlich zwischen "bewusster Kühlung" und der durch
die wechselnde Einstrahlung sich ständig ändernden Temperatur kaum
unterscheiden konnte. Also habe ich das Experiment am Folgetag mit zwei
Modulen an der gleichen Last (Bleiakku, die Module über Dioden
zusammengeschaltet) wiederholt, und nur immer ein Modul gekühlt. Trotz
der Ungenauigkeit der Messungen (Toleranz der Messköpfe, unterschiedlich
lange Zuleitungen, nur am Rand der Module positionierte Temperaturfühler,
...) lässt sich aus dem (aus den aufgezeichneten Daten gewonnenen)
Diagramm deutlich erkennen, zu welchem Zeitpunkt ich welches Modul
gekühlt habe. Der Einfluß der Modultemperatur auf die abgegebene
Leistung erscheint mir enorm hoch. Nun muß ich "nur noch"
ermitteln/ausrechnen, ab welcher Temperatur/Last es "lohnenswert" ist,
eine kleine Wasserpumpe oder ein Magnetventil (welches natürlich vom
Modul versorgt wird) zu aktivieren...
|
Das "Material"
Schaltplan des Messkopfes im Eagle-Format (incl. seriellem Adapter).
Layout des Messkopfes im Eagle-Format (incl. seriellem Adapter).
Schaltplan des Displays im Eagle-Format.
Schaltplan des Buscontrollers im KiCad-Format.
Schaltplan der Ladeschaltung im KiCad-Format.
Simulationsdaten der Ladeschaltung im KiCad-Format.
Schaltplan der Unterspannungsabschaltung im KiCad-Format.
Simulationsdaten der Unterspannungsabschaltung im KiCad-Format.
Von der Veröffentlichung des Quellcodes der verschiedenen PIC-Programme habe ich erst einmal abgesehen, da sich dieser Code momentan in einem grausigen Zustand befindet, und wohl noch so einige Änderungen erfahren wird.
Hinweise für Nachbauwillige:
Wer diese Gerätschaften nachbauen möchte, sollte über die Möglichkeiten der Herstellung einseitiger Leiterplatten und etwas Kentnisse der angewendeten Technik verfügen. Es handelt sich hierbei nicht um einen Bausatz, sondern eher um eine Anregung für eigene Konstruktionen. Alles, was ich dazu anbieten kann, befindet sich auf dieser Seite, d.h. Nachfragen nach fertigen Geräten, Bausätzen oder fertigen Leiterplatten zwecklos → Ich "produziere" ausschliesslich für den Eigenbedarf.
Für die Funktionalität und Nachbausicherheit dieser Gerätschaften kann ich keinerlei Verantwortung übernehmen. Eine kommerzielle Verwertung der Schaltpläne oder des Layouts ist nur mit meiner ausdrücklichen Genehmigung zulässig.
Startseite Hardware Rechtliches Kontakt