
Bei meinem Basteleien ergibt sich gelegentlich die Aufgabe, den zeitlichen Verlauf eines oder mehrerer Messwerte (meist Spannungen) anzuzeigen/aufzuzeichnen. Sind die Verläufe der Messwerte periodisch, und der zeitliche Messbereich liegt im Bereich von Milli- bis Mikrosekunden, lässt sich das recht einfach mit einem –bei jedem (einigermassen ausgestatteten) Elektronikbastler vorhandenen– Oszilloskop bewerkstelligen. Bei einmaligen Vorgängen wird jedoch schon ein Speicheroszilloskop benötigt... Aber wie sieht es denn aus, wenn es sich um sehr langsame Verläufe und damit um Aufzeichnungbereiche von Minuten (oder gar Stunden) handelt? In Ermangelung eines DSOs (Digitales Speicher Oszilloskop) oder eines entsprechenden "Datenloggers" habe ich somit die ersten Entladungskennlinien von Akkus (mein zu der Zeit aktuelles Experimentiergebiet) mit Hilfe von Multimeter, "Küchentimer", Bleistift und Papier aufgenommen, die aufgezeichneten Daten in den PC übertragen, und mir dann die entsprechenden Kurvenverläufe darstellen lassen -> Ein mühseliges, zeitraubendes, fehleranfälliges, und nicht besonders effektives/genaues Verfahren... Diese stumpfsinnige Tätigkeit lässt sich doch bestimmt auch einem PIC mit A/D-Wandler übertragen...
Die Datenübertragung
|
Wie sollen die Messdaten (die hier vorhandenen PICs enthalten A/D-Wandler mit
einer Auflösung von 10 Bit) zum PC übertragen werden? USB wäre
ja "modern" (und würde eine Stromversorgung bieten), aber die
von mir hauptsächlich verwendeten (8beinigen) PICs haben kein direktes
Interface zu USB. Ausserdem verfügen diese Chips nur über einen
kleinen Speicherbereich (maximal 200 Byte). "Dickere" PICs haben
zwar mehr Speicher, fressen aber auch mehr Platz und Strom. Ausserdem
müsste ich bei einer "Langzeiterfassung" dauernd den PC laufen
lassen -> Ineffektiv, zu hoher (und unnötiger) Energiekonsum.
Also: "Klassisch seriell", denn dann kann ich statt des
ständig laufenden PCs auch meinen guten alten "seriellen
Druckerpuffer" (256kByte, Energieverbrauch ca. 5W) zur
Zwischenspeicherung der Messdaten verwenden.
|
Die Stromversorgung
|
Da der Messadapter möglichst unabhängig von einer externen
Stromversorgung arbeiten soll, und der vorgesehene
PIC-12F675
recht sparsam im Stromverbrauch ist, bietet sich Batteriebetrieb an. Jedoch
eine serielle Schnittstelle nach RS-232
benötigt eine negative Spannung. Ein üblicher Interface-Chip vom Typ
MAX232
(der diese Spannung aus +5V erzeugt) verbraucht aber mindestens 4mA, das wäre
das Doppelte des Stromverbrauchs des PICs. Bestimmt existieren auch ähnliche
Chips, die den Pegel nur eines seriellen Kanals wandeln und weniger
Strom verbrauchen, nur die sind dann wieder schwer zu beschaffen... Also
entwickle ich mir lieber selbst einen Pegelwandler. Die ganze Schaltung soll
sowieso "recht klein" ausfallen, somit bietet sich eine 9V-Blockbatterie
(oder ein entsprechender Akku) an. Da der PIC (incl. A/D-Wandler) bei der
Verwendung des internen Oszillators ab 3V arbeitet, und für die Referenz
des A/D-Wandlers auf jeden Fall eine stabilisierte Betriebsspannung benötigt, liegt
es doch nahe, die "restliche" Spannung zu den 9V als negative
Spannung für die serielle Schnittstelle zu verwenden. Damit liegt zwar
der Minuspol der Batterie nicht mehr auf "Masse", aber bei
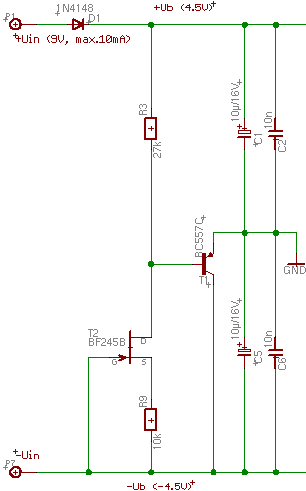
Batteriebetrieb ist das ja auch nicht notwendig... Die nebenstehende Schaltung
erzeugt ein "passendes Massepotential", indem sie den Pluspol der
Batterie genau so weit verschiebt, daß sich eine stabilisierte Spannung
von ca. 4.5V (abhängig von den Kennlinien des FET) für den PIC
ergibt. Der "Rest" der 9V dient zur Erzeugung der negativen Spannung
für die serielle Schnittstelle (und schwankt ggf. abhängig von der
Batteriespannung). Das Ganze funktioniert natürlich nur, wenn ein
Stromverbraucher (der PIC) an der positiven Betriebsspannung (gegen
"Masse") angeschlossen ist... Der PIC benötigt (je nach
"Aktivität") 1-2mA, diese Stabilisierung etwa 200µA, und
der "serielle Treiber" (beim Senden von Daten) nochmal etwa 1mA. Im
Mittel sollte der Stromverbrauch also bei weniger als 2mA liegen, womit ein
9V-Akku mit 150mAh mindestens 3 Tage lang "halten" sollte, eine
Batterie vermutlich sogar noch länger.
Achtung: Der für R9 (und/oder auch R3) zu verwendende Wert ist abhängig von der Kennlinie von T2 und muss ggf. angepasst werden: Die Spannung über R9 sollte knapp 2V betragen, die Spannung über R3 etwa 5.1V. |
|
Das Steuerungsprogramm
|
Der erste Ansatz zu diesem Messadapter ergab sich aus einer
Problemstellung, bei der es darum ging, einige Messwerte in Intervallen
von einer Sekunde aufzuzeichnen und davon Kurven in einem Diagramm zu
erstellen. Da zwischen den Messungen mehr als genügend
"Rechenzeit" vorhanden war, entschloß ich mich (im Gegensatz
zu dem Verfahren bei meinem Solarwandler),
die Daten gleich im PIC in dezimale ASCII-Ziffern umzurechnen. Das ersparte
mir ein zusätzliches Skript/Programm zur Datenumwandlung. So konnte
ich die mit einem Terminalprogramm aufgezeichneten/gepeicherten seriellen
Daten direkt an Gnuplot
"verfüttern", welches mir (mit Hilfe einiger weniger
Skriptzeilen) daraufhin die gewünschten, "fast präsentierbaren"
Diagramme erzeugte. Danach wanderte die Konstruktion (wie viele der von
mir enwickelten "temporären Problemlösungen") in den
Karton mit der Aufschrift "Zum Ausschlachten". Da sich bei einem
der folgenden Projekte eine ähnliche Aufgabe ergab, kramte ich die
Schaltung wieder hervor, passte das "hartcodierte" Progamm auf
die neue Anforderung an, erledigte damit die notwendigen Messungen, und
packte den Prototypen wieder zurück in den Karton. Nachdem ich den
Adapter das dritte Mal "wiederbelebt" hatte, fiel mir mir auf,
daß diese kleine Schaltung anscheinend doch ein sehr nützliches
Hilfsmittel ist, welches durchaus mehrfach verwendbar ist. Nur das
Umprogrammieren auf die jeweils neuen Anforderungen war dabei ziemlich
lästig. Also war es notwendig, die hartcodierten Parameter (das
Messintervall und die Anzahl der zu messenden Kanäle) irgendwie
"einstellbar" zu machen. Wie soll das denn gehen, wenn
sämtliche I/O-Pins des verwendeten PICs bereits mit A/D-Eingängen,
serieller Ausgabe und Reset belegt sind? Nach intensiven Lesens des
Datenblatts des PICs fiel mir auf, daß ein separates Reset-Signal
nicht unbedingt notwendig ist, falls die Betriebsspannung einigermassen
stabil ist. Ok, mit der (in diesem Fall wohl zulässigen)
"Zweckentfremdung" des Reset-Pins ergab sich ich die
Möglichkeit einer "Benutzereingabe" mittels eines Tasters.
Und für die Informationen, die vom Programm zum Anwender
gehen sollten, konnte ich ja die bereits vorhandene serielle Schnittstelle
verwenden.
|
Das "Konfigurationsmenü"
|
Damit der Messadapter auch ohne "Interaktion mit dem Benutzer" (z.B.
angeschlossen an einem Datenpuffer) einsetzbar bleibt, wird der Programmteil zur
Konfiguration nur ausgeführt, wenn beim Einschalten der Betriebsspannung
der Taster gedrückt ist. Andernfalls beginnt sofort die Messung mit den
zuletzt eingestellten (und gepeicherten) Parametern. Das minimale Menü
zeigt nacheinander die aktuell eingestellten Werte für die serielle
Geschwindigkeit, die Anzahl der zu messenden Kanäle, und das Messintervall
an. Ein kurzer Tastendruck (<300ms) wird als Bestätigung ("ja")
angesehen, und es geht mit dem nächsten Menüpunkt weiter. Ein langer
Tastendruck (>300ms, "nein") fordert das Programm zu einem anderen
Vorschlag für den aktuell einzustellenden Wert auf. Wurden alle auf diese
Weise einstellbaren Werte bestätigt, erscheint noch die Frage "OK?".
Wird auch diese Frage bestätigt, werden die evtl. geänderten Werte
gespeichert und zur Programmausführung gesetzt (ggf. wird auch die
serielle Geschwindigkeit geändert). Danach beginnt der Messvorgang. Wird
die letzte Frage nicht bestätigt (langer Tastendruck), beginnt das Menü
wieder von vorne. Wird vor der Bestätigung der Frage "OK?" die
Spannungsversorgung der Schaltung unterbrochen, bleiben die urspünglichen
Einstellungen erhalten. Da bestimmte Kombinationen von Geschwindigkeit, Kanalanzahl
und Messintervall nicht möglich sind (-> Die serielle Ausgabe der Daten
dauert länger als das Messintervall), werden diese Intervalle mit der
Angabe "too short" angzeigt, und sofort der nächstmögliche
Wert vorgeschlagen. Um die Anzahl der zu übertragenden Daten zu
reduzieren, habe ich im Zuge des Einbaus dieses Menüs auch gleich die
Begrenzung eines Messwertes auf drei Stellen (also max. "999")
vorgenommen. Der A/D-Wandler kann zwar Werte bis 1023 erzeugen, jedoch wäre
dafür für jeden Messwert ein weiteres (meist ungenutztes) Zeichen zu
übertragen. Die dadurch entstehende Einschränkung des Messbereichs
beträgt ausserdem nur etwa 2%.
|
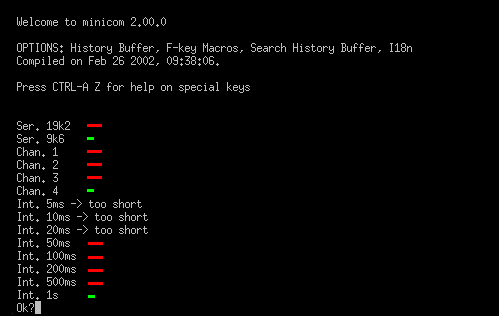
Bei diesem Beispiel sind die Tastenbetätigungen als farbige Balken
eingefügt:
Rot = lang Grün = kurz Die aktuelle Einstellung war 19200Bd, 1 Kanal, 5ms Intervall. Die neue Einstellung ist 9600Bd, 4 Kanäle, 1s Intervall. |
Das "OSCCAL"-Problem
|
Da der PIC mit seinem eingebauten 4MHz-Oszillator betrieben wird, sind alle
Intervalle (u.a. auch die Taktrate der seriellen Daten) von dieser
Oszillatorfrequenz abhängig. Diese Frequenz ist jedoch u.a. von der
Betriebsspannung und der Temperatur abhängig. Um Toleranzen bei der
Chipfertigung kompensieren zu können, hat der Hersteller der PICs eine
Möglichkeit vorgesehen, die Oszillatorfrequenz mit Hilfe des Inhalts
einer Speicherstelle (eines Registers names "OSCCAL")
"abzugleichen". Nach der Fertigung der Chips wird eine spezielle
Funktion in den Programmspeicher "gebrannt", die beim Aufruf aus
dem PIC-Programm den chipspezifischen Abgleichwert (für 5V
Betriebsspannung und 20° Umgebungstemperatur) als Ergebnis liefert. Ein
PIC-Programm, welches "zeitkritisch" arbeitet, sollte daher beim
Start diese Funktion aufrufen, und das Ergebnis in das OSCCAL-Register
schreiben. Danach ist davon auszugehen, daß der interne Oszillator
"abgeglichen" ist. Wird der PIC jedoch mit einer anderen Spannung
als 5V betrieben (und/oder bei einer anderen Temperatur als 20°), muss
dieser Wert nicht mehr unbedingt "richtig" sein... Ausserdem
überschreiben viele Programmer (Hard- und Software zum "Brennen"
eines Programms in den PIC) die spezielle Funktion zur Ermittlung des
Abgleichwertes... Mir fiel bei einer Messung mit vielen Messintervallen
auf, daß das Produkt aus der Anzahl und der Dauer der Messintervalle
doch etwas von der Gesamtzeit der Messung differierte. Also musste ich in
meinem Konfigurationsmenü noch eine Möglichkeit zur Kalibrierung
des internen Oszillators des PICs schaffen. Nur wo sollte ich denn das
dazu notwendige Kalibrierungssignal ausgeben? Nach einigem Überlegen
habe ich mich dazu entschlossen, dafür ebenfalls den Pin, der die
serielle Schnittstelle ansteuert, zu verwenden (der zweckentfremdete
Reset-Pin könnte durch die Taste kurzgeschlossen sein, und die
analogen Eingänge könnten ebenfalls "irgendwie verschaltet"
sein). Die Ausgabe eines 1kHz-Signals für fünf Sekunden erzeugt zwar
ggf. eine Menge "seltsamer Zeichen" in dem zum Abgleich verwendeten
Terminalprogramm, aber es kann dabei "nichts kaputtgehen".
Da der Abgleichwert aus sechs Bits besteht, und ein "Durchprobieren"
der sich daraus ergebenden 64 Möglichkeiten ein ziemlich langwieriges
Verfahren darstellen würde, habe ich mich entschlossen, diese
Einstellmöglichkeit auf zwei mal drei Bit (jeweils acht Möglichkeiten)
aufzuteilen (->OscH und OscL), wobei erst eine Grob- und dann die
Feineinstellung erfolgt.
|
Der Kalibrierungsvorgang
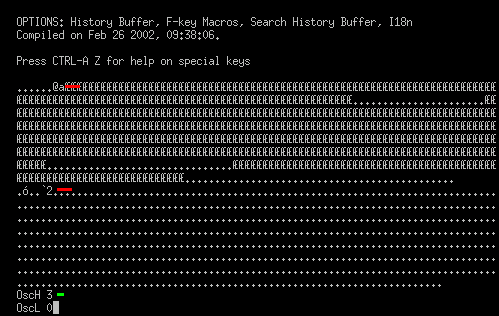
Auch in diesem Beispiel sind die Tastenbetätigungen als farbige Balken
eingefügt:
Rot = lang Grün = kurz Deutlich erkennbar sind die durch das Kalibrierungsignal verursachten "seltsamen Zeichen". |
Um den korrekten OSCCAL-Wert zu ermitteln (und einzustellen), ist an Pin 2 des
PICs (oder an dem entsprechenden Signal an R8) ein Zähler (oder auch ein
Oszilloskop) anzuschliessen. Nach dem Einschalten (Taste dabei gedrückt
halten) des Messadapters sollte im Terminalprogramm der Text "OscH"
und ein Wert zwischen null und sieben angezeigt werden. Erscheinen nur
"seltsame Zeichen", stimmt entweder die serielle Geschwindigkeit
des Terminalprogramms nicht mit der Geschwindigkeit des Messadapters überein
(der Standardwert ist 9600Bd), oder die Kalibrierung "liegt völlig
daneben". In einem solchen Fall ist es zu empfehlen, die Taste
"lange" zu drücken, und das (nach Loslassen der Taste) für
fünf Sekunden erzeugte Kalibrierungssignal (sollte 1kHz betragen) zu
messen, und dabei die Ausgabe im Terminalprogramm einfach zu ignorieren. Nach
jedem langen Tastendruck ändert sich die ausgegebene Frequenz ein wenig.
Bei mindestens einer der acht möglichen Einstellungen sollte am Ende des
angezeigten "Datenmülls" der Text "OscH" und eine
Ziffer lesbar sein. Ist das nicht der Fall, stimmt die Einstellung der
Datengeschwindigkeit am Terminalprogramm nicht. Der "lesbare" Wert
(ggf. ±1) ist der richtige Wert für die Einstellung "OscH".
Nach einem kurzen Tastendruck erfolgt nun die Feineinstellung, bei der der
Text "OscL" (und eine Ziffer) fast immer lesbar bleiben sollte.
Auch hierbei sind wieder acht verschiedene Einstellungen möglich,
wobei die Einstellung gewählt werden sollte, bei der das Kalibrierungssignal
möglichst genau 1kHz beträgt. Nach einem kurzen Tastendruck ist
die Kalibrierung abgeschlossen (jedoch noch nicht gespeichert), und das
Menü bietet die Einstellmöglichkeiten für serielle
Geschwindigkeit, Kanalzahl, und Messintervall an. Nach Bestätigung der
Frage "OK?" mit einem kurzen Tastendruck werden alle konfigurierten
Werte (also auch die Werte der Frequenzkalibrierung) gespeichert und dieser
etwas umständliche (und hoffentlich einmalige) Abgleich ist
abgeschlossen. Bei einer gewünschten Änderung der Messparameter
(Einschalten, während die Taste gedrückt ist) sind die beiden
ersten Parameter ("OscH" und "OscL") einfach mit einem
kurzem Tastendruck zu bestätigen, und die weiteren Parameter können
ohne Änderung der Kalibrierung verstellt werden.
|
Bekannte Eigenarten ("Known Bugs") des Prototypen
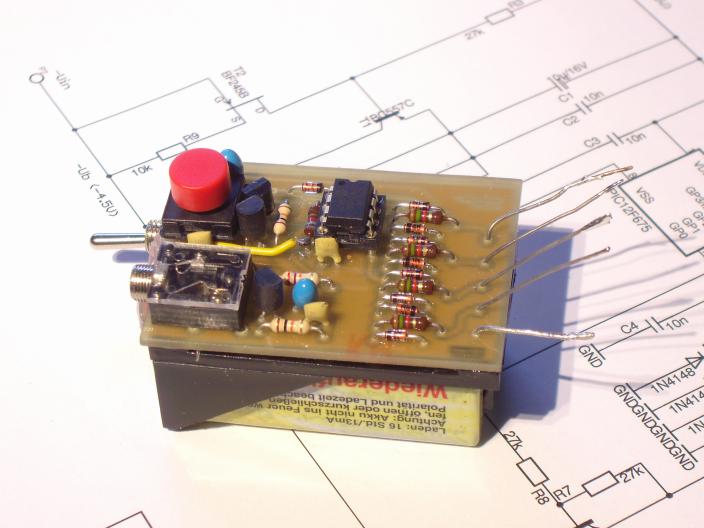
Der nachträglich eingefügte Taster ist an R1 angeschlossen worden.
Unterhalb der Platine wurden ein Batteriehalter und ein Schalter für
die Betriebsspannung angeklebt.
|
Daß der Prototyp einer neuen Schaltung meist einige "Eigentümlichkeiten"
aufweist, wird bestimmt jedem Entwickler bekannt sein. Hier die mir bekannten
"unschönen Effekte" dieser Schaltung, die mir beim Betrieb
aufgefallen sind:
|
Das "Material"
Schaltplan (V0.1) im Eagle-Format
Layout (V0.1) im Eagle-Format
Quellcode (V0.2) des Steuerungsprogramms (unter GPL2)
Hexcode (V0.2) des Steuerungsprogramms (unter GPL2)
Hinweise für Nachbauwillige
Um den Prototypen dieses Adapters nachzubauen, sind Möglichkeiten der Herstellung einseitiger Leiterplatten und Programmierung des verwendeten Microcontrollers notwendig. Es handelt sich hierbei nicht einen Bausatz, sondern eher um eine Anregung zu eigenen Konstruktionen. Alles, was ich dazu anbieten kann, befindet sich auf dieser Seite, d.h. Nachfragen nach Bausätzen, fertigen Leiterplatten oder programmierten PIC-Controllern sind zwecklos → Ich "produziere" ausschliesslich für Eigenbedarf.
Für der Funktionalität und Nachbausicherheit dieser Schaltung kann ich keinerlei Verantwortung übernehmen. Eine kommerzielle Verwendung des Schaltplans oder des Layouts ist nur mit meiner ausdrücklichen Genehmigung zulässig. Das PIC-Programm unterliegt der GNU Public License Version 2.
Startseite Hardware Rechtliches Kontakt Darstellung