
|
Nachdem ich mit meinem QRP-PC nun schon
einige Jahre gearbeitet habe, wurde es so langsam mal Zeit, eine
neuere/verbesserte Version davon herzustellen. Das bisherige Gerät hat
zwar noch einige Erweiterungen bekommen (WLAN-Anschlußbuchse, Schalter,
um den Lüfter bei Bedarf auf 12V zu schalten, ...), aber irgendwie
wäre eine Echtzeituhr, eine Lüftersteuerung, und ein einfachere
Start/Stop-Prozedur doch ganz schön ... Naja, um das Gerät einfach
mal auszuschalten, und es kümmert sich selber darum, das System
herunterzufahren, wäre ein Pufferakku und eine Kommunikation mit dem
RasPi schon notwendig. Die Kommunikation könnte ein Mikrocontroller
übernehmen, der dann auch gleich eine Echtzeituhr bereitstellen
könnte ... Also habe ich mal ein grobes Diagramm entworfen, welches
sich im Laufe der Entwickung noch mehrfach veränderte.
|
Der neue Entwurf
|
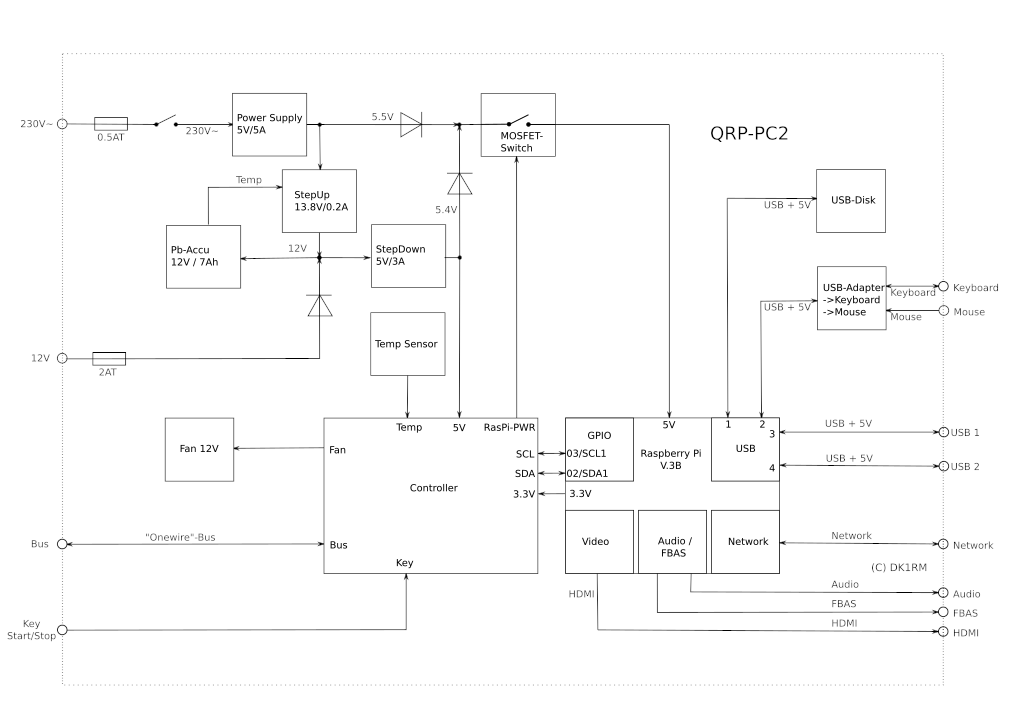
Da der steuernde Microcontroller (der u.a. als Echtzeituhr fungiert)
dauernd mit 5V versorgt werden muss, das gesamte Gerät aber auch mit
12V betreibbar sein soll (→Solarbetrieb), bot sich ein
12V-Bleigelakkumulator und ein Spannungswandler "12V→5V" an.
Dieser Spannungswandler ist für 3A ausgelegt, da u.U.
(12V-Betrieb oder Netzausfall) über diesen Weg auch der RasPi mit 5V
versorgt wird. Bei Netzbetrieb übernimmt ein 5V/5A-Schaltnetzteil die
Versorgung des Controllers und des RasPi. Außerdem wird dabei der Akku mit
Hilfe eines weiteren Spannungswandlers "5V→∼13.8V" geladen.
Die genaue Ausgangspannung dieses Wandlers wird mit Hilfe eines
Temperaturfühlers (am Akku montiert) geregelt, um den Akku auch an
sehr warmen Tagen nicht zu überladen. Die aus verschiedenen Quellen
stammenden "5V"-Spannungen werden im Blockschaltplan mit Hilfe von
Dioden zusammengeführt. In der realen Schaltung werden dafür
MOSFET-Dioden verwendet, da
konventionelle Dioden eine zu hohe Flußspannung (und damit
Verlustleistung) hätten. Die Ausgangsspannung des 5V-Netzteils ist
geringfügig höher eingestellt als der Ausgang des Spannungswandlers,
damit sicher gestellt ist, daß das Netzteil den RasPi bei Netzbetrieb
versorgt (und nicht der Spannungswandler).
|
Die Schaltung des Controllers
|
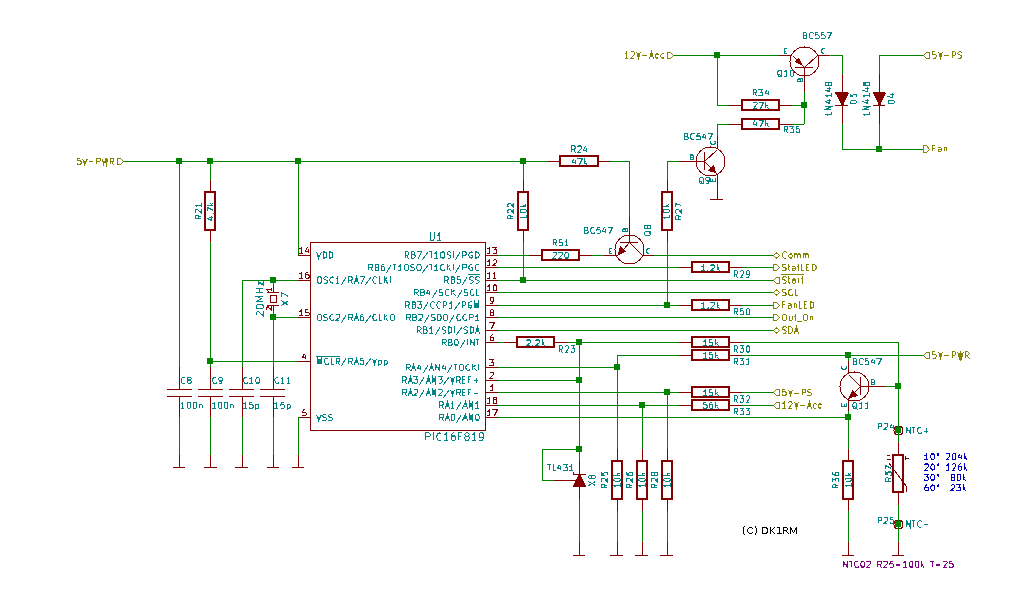
Die primäre Aufgabe des Controllers ist es, die Stromversorgung des RasPi
mit Hilfe eines MOSFETs ein- und auszuschalten. Um die entsprechenden
Zeitpunkte dafür zu bestimmen, sind ein paar Messwerte (z.B. Ausgangsspannung
des Netzteils und Spannung/Ladezustand des Akkus) notwendig, sowie eine
Kommunikation mit dem RasPi. Zur Kommunikation wird in diesem Fall
der I2C-Bus
des RasPi verwendet, dessen Signale mit Hilfe von
bidirektionalen Pegelwandlern an die
Betriebsspannung des Controllers angepasst werden. Über diesen
Bus kann z.B. ein Programm/Script, welches auf dem RasPi läuft, die
(verzögerte) Abschaltung anfordern. Andererseits kann der Controller
auf diesem Weg ermitteln, ob der RasPi noch läuft, und im Falle eines
"Hängens" den RasPi abschalten ("Communication Timeout").
Zur Drehzahlregelung des Lüfters ist ein Temperaturfühler vorgesehen, mit dem die Temperatur im Gehäuse gemessen wird. Außer dieser autonomen Funktion kann die Drehzahl auch durch eine Anweisung vom RasPi erhöht werden (z.B. von einem Programm, welches die CPU-Temperatur bestimmt). Zusätzlich sind noch ein (Start/Stop-) Taster, LEDs zur Zustandsanzeige, und ein Interface zu meinem "Eindraht-Kommunikationsbus" vorgesehen. |
|
Das Layout der Steuerungsplatine
|
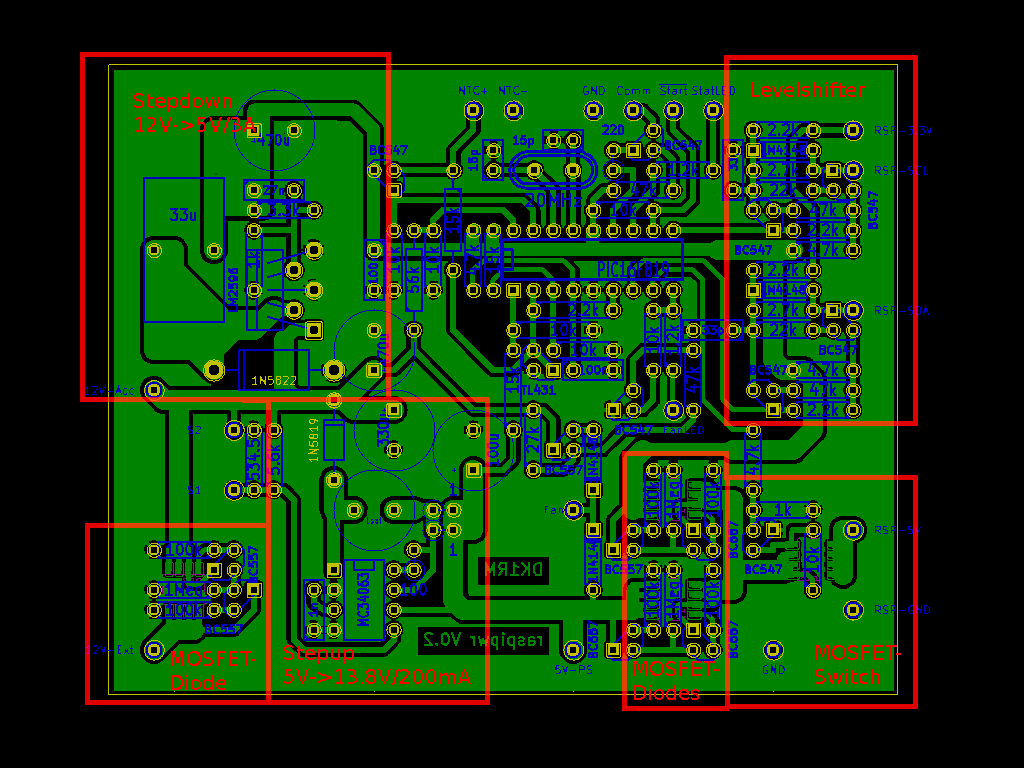
Die gesamte Schaltung der Steuerung findet auf einer einseitigen Leiterplatte
von 100x76mm Platz. In dem nebenstehenden Layout ist die Position der
einzelnen Funktionsgruppen dargestellt. Die Verbindungen zum restlichen
System sind mit Leitungen ausgeführt. Auf Steckverbinder habe ich
einerseits aus Platzgründen verzichtet, andererseits müssen einige
Zuleitungen (Netzteil, Akku, ...) möglichst niederohmig ausgeführt
werden.
|
Der Entwurf des Gehäuses
|
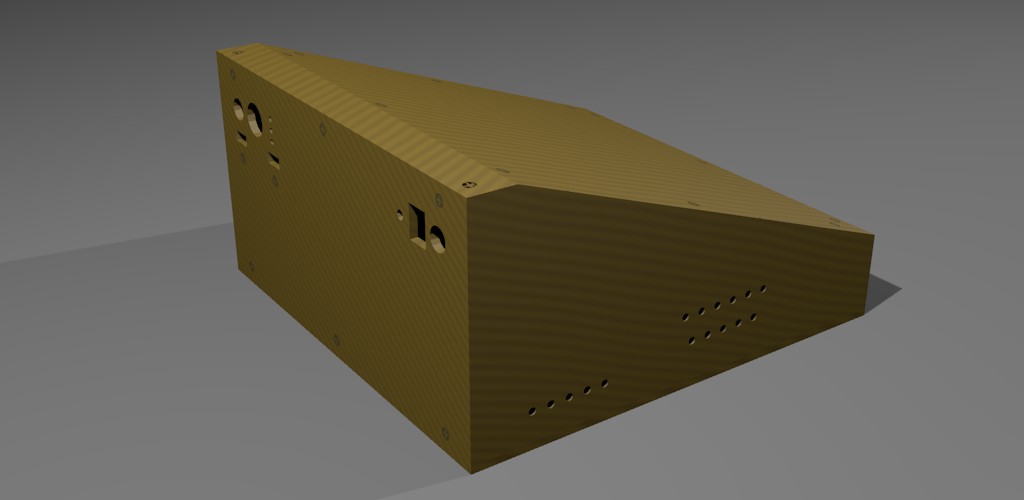
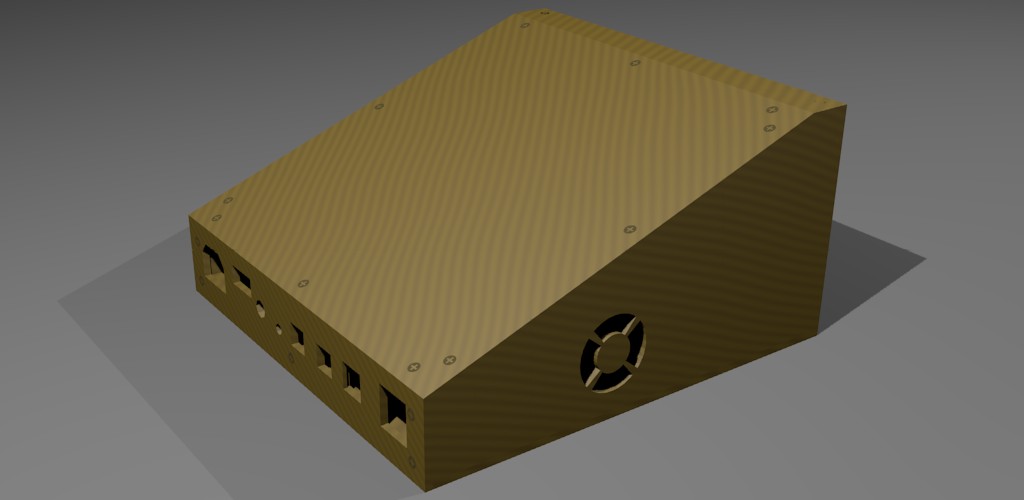
Um den Platzbedarf des Geräts auf dem Basteltisch möglichst gering zu
halten, habe ich einen Aufstellungsort gewählt, der sonst kaum genutzt
werden kann: Unter dem Oszilloskop, welches auf dem aufgeklappten Tragegriff
steht, um einen bequemen Zugang zu den Bedienelementen zu bieten. Damit ergab
sich ein keilförmiger Raum mit einer Grundfläche von ca. 24x25cm, in
dem die Einzelkomponenten anzuordnen sind.
Als Material habe ich Sperrholz gewählt, welches relativ einfach zu
bearbeiten ist, und mit Hilfe von Profilleisten zu einem recht soliden
Gehäuse führt. Dadurch konnte ich mir die fummelige Herumlöterei
auf dem RasPi-Board ersparen, die für die Herausführung eines
WLAN-Anschlußes notwendig gewesen wäre.
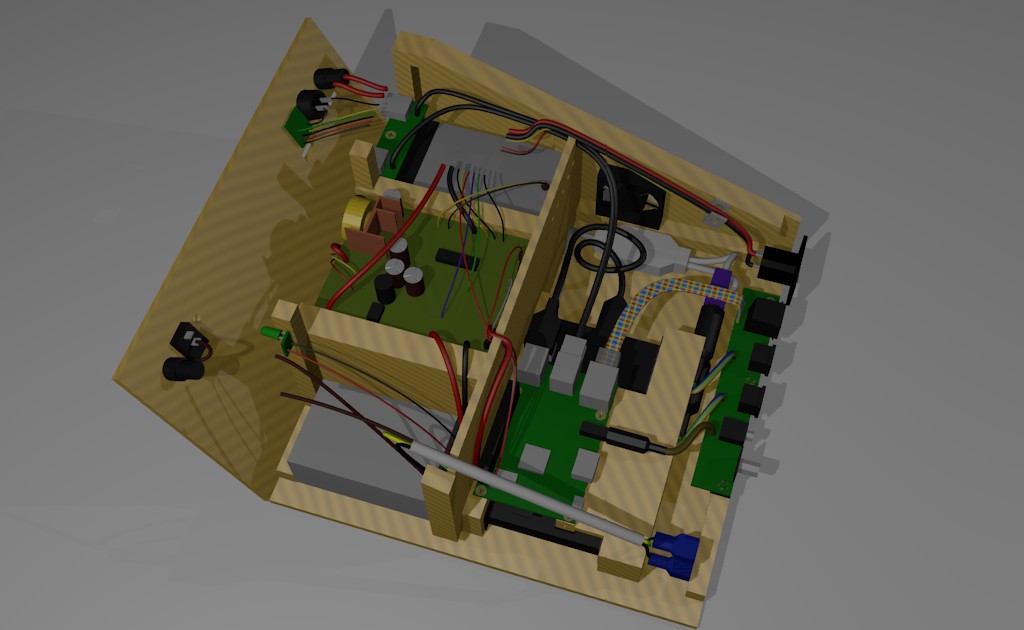
Da zu erwarten war, daß die Anordnung und Befestigung der Bauteile im Gehäuse nicht gerade trivial wird, habe ich den Aufbau erst einmal in Blender simuliert. Dieses Programm ist zwar nicht unbedingt für die Anwendung im CAD-Bereich vorgesehen, kann dafür aber (nach etwas Einarbeitung) zweckentfremdet werden, und liefert durchaus Eindrücke, ob etwas etwas in der vorgesehenen Weise konstruiert werden kann, oder nicht. |
|
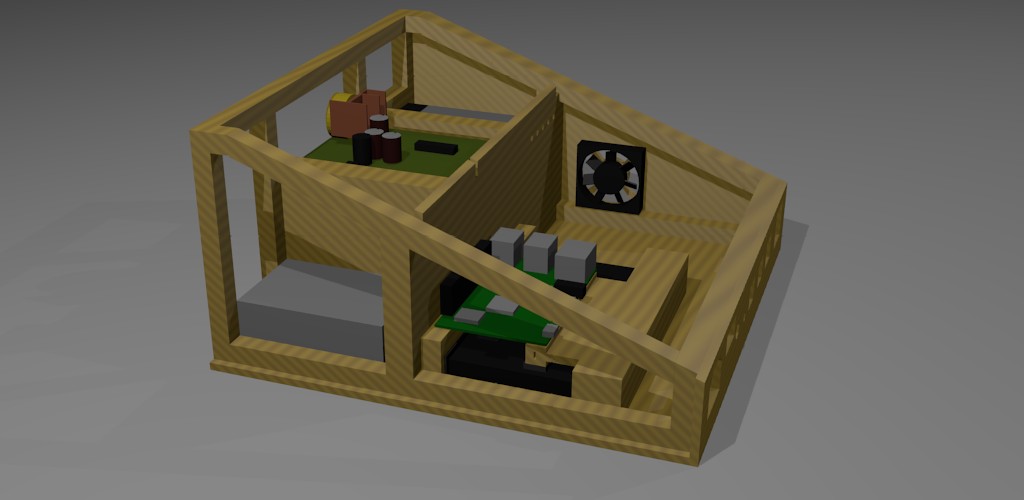 |
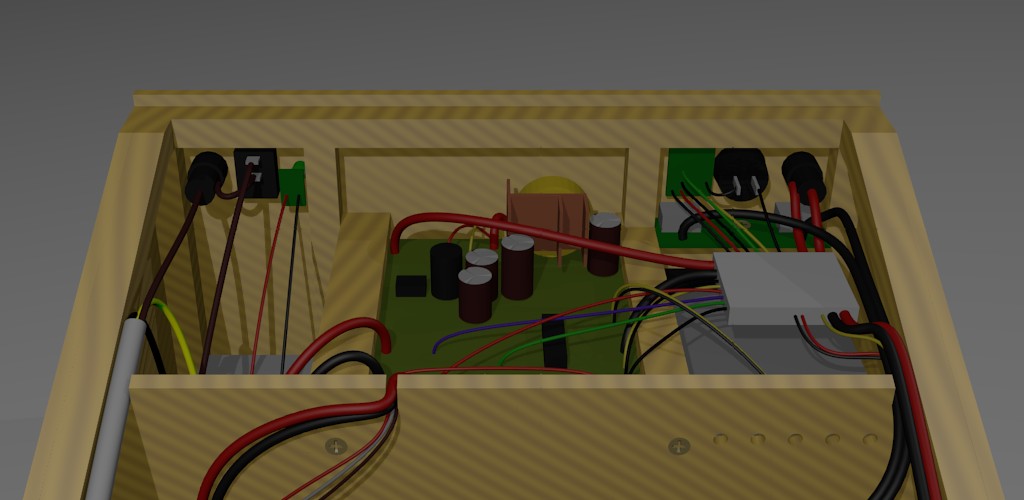
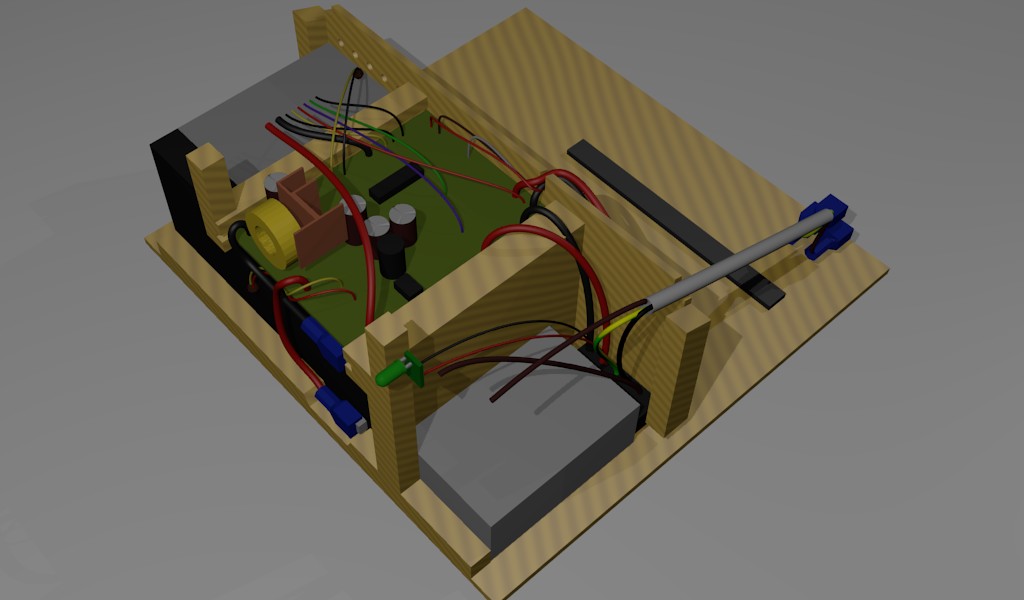
Die ersten Überlegungen betrafen die Frage, wie ein Luftstrom zu
den wärmeerzeugenden Bauteilen geleitet werden kann. Dazu habe ich das
Gehäuse durch eine Tennwand in zwei Bereiche unterteilt. Im
hinteren Teil (rechts im Bild) befinden sich der RasPi, darunter die
USB-Festplatte, und ein Lüfter. Durch zwei Reihen von Luftlöchern in
der (im Bild entfernten) Seitenwand gelangt ein Luftstom zum RasPi und der
Festplatte, und wird durch den Lüfter aus dem Gehäuse befördert.
Die Wirksamkeit dieses Luftstroms sollte sich anhand der CPU-Temperatur
bestimmen lassen. Für die Belüftung des Netzteils (links unten im
Bild) befindet sich ebenfalls eine Reihe Luftlöcher in der Seitenwand. Nach
Durchströmung des Netzteil strömt die Luft nach oben, an der
Steuerungsplatine vorbei, und dann durch die Lochreihe (hinten) in der Trennwand
zum Lüfter. Da sich der Temperaturfühler des Controllers
nahe der Steuerungsplatine (unter dem sich übrigens der Akku verbirgt)
befindet, sollte auch die Temperatur dieses Luftstroms zu ermitteln sein. Ob die Anzahl
und Position der Luftlöcher ausreichend und gut gewählt ist, wird
sich erst im praktischen Betrieb zeigen, ggf. muss ich das noch optimieren.
Die im Bild sichtbaren zusätzlichen Aussparungen in der Trennwand
dienen der Durchführung von Leitungen und sollten somit
einigermaßen luftdicht "verstopft" sein.
|
|
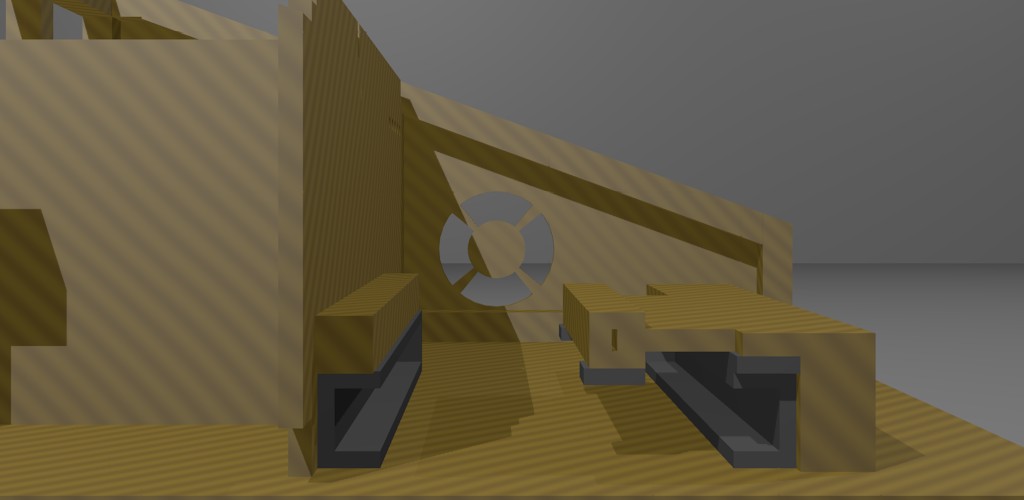
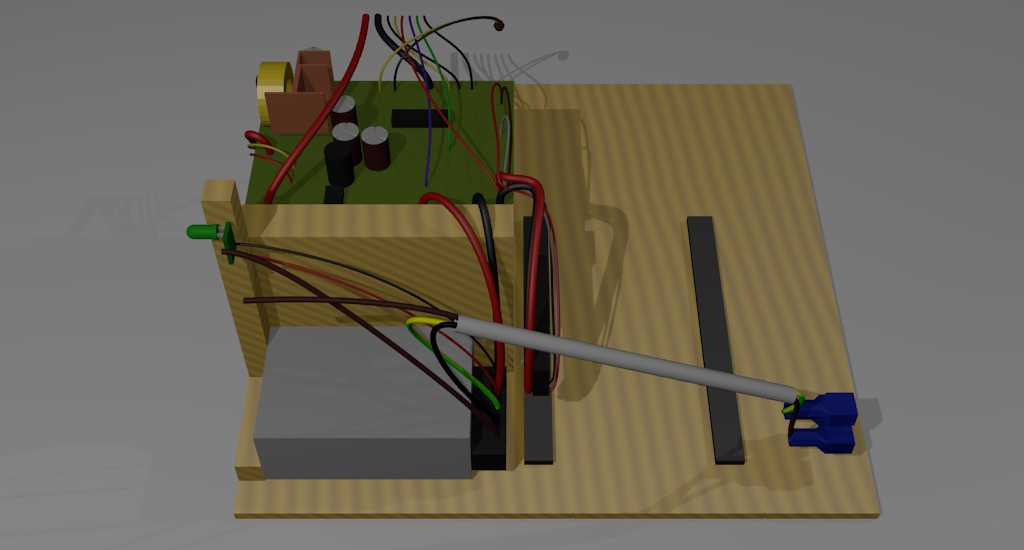
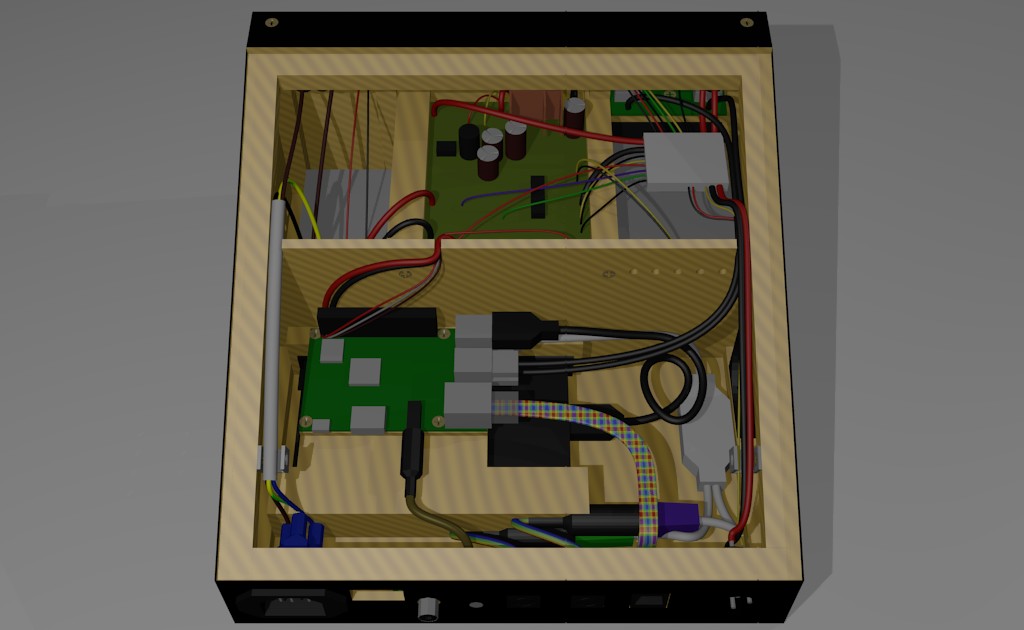
Damit das Gerät einigermaßen portabel und beweglich ist, sollten
sämtliche Bauteile im Innern gut befestigt sein, und nicht bei einer
Bewegung im Gehäuse herumpoltern. Gut, der RasPi und das Netzteil
lassen sich anschrauben, der Akku ist so eng verbaut, daß er sich nicht
bewegen kann, aber was ist mit der Notebook-Festplatte? Die benötigte
eine Halterung, die sie zwar an Bewegungen hindert, aber auch ein wenig weich
und flexibel ist. Die Lösung fand ich in Form von Dichtungsstreifen, die
z.B. zur Abdichtung von Fenstern vorgesehen sind. Das Material besteht aus
einem recht festen (ca. 2mm dicken) schwarzen Schaumstoff, der auf einer Seite
mit einer selbstklebenden Schicht, und auf der anderen Seite mit einer Folie
beschichtet ist. Im nebenstehenden Bild ist dieses Material grau dargestellt,
und ein paar Teile des Gehäuses wurden entfernt, um einen Bilck auf den
Aufbau der "Lagerungsschienen" der Notebook-Platte werfen zu
können. Diese Art der Lagerung ermöglicht es einerseits, daß
auch unter der Festplatte etwas Luft durchströmen kann, andererseits
dämpft sie auch die Vibrationen/Geräusche, die von der Platte auf
das Gehäuse eingekoppelt werden könnten.
|
 |
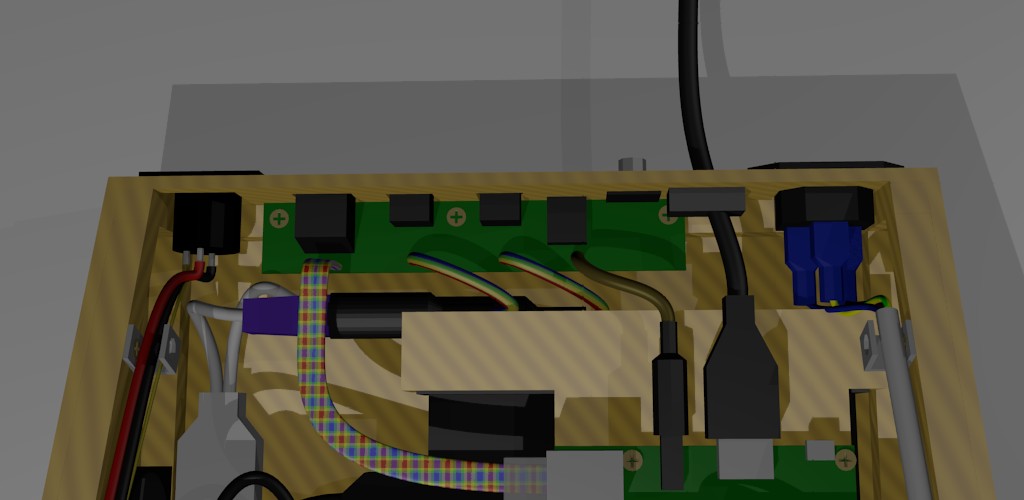 |
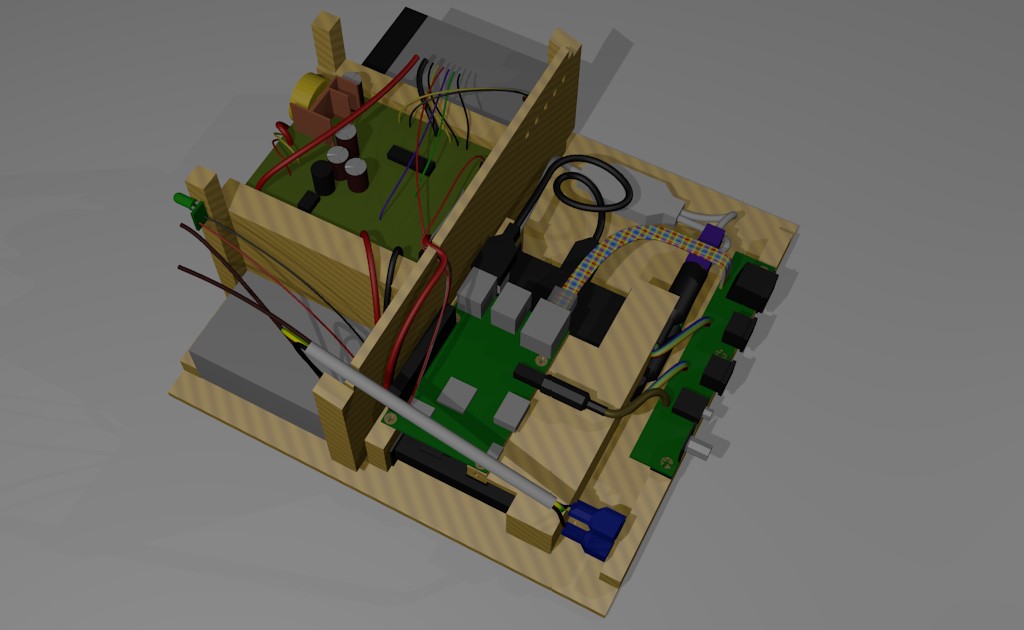
Um mir die Montage von Steckverbindern und LEDs in Frontplatte und
Rückwand zu vereinfachen, habe ich noch vier kleine Leiterplatten
entworfen, auf denen die entsprechenden Buchsen, LEDs und etwas
"Kleinkram" untergebracht sind. Diese Platinchen sind mit Hilfe
von ein paar Leitungen und Steckern mit dem "Innenleben"
verbunden. Im nebenstehenden Bild sind die Anschlüsse an der Rückwand
zu sehen (v.l.n.r.): Externer 12V-Eingang mit Kommunikationsbus (XLR),
Netzwerk (RJ45), Keyboard und Maus (Mini-DIN), Audio (3.5mm Klinke),
FBAS (Cinch), und Netzversorgung (Kaltgeräte). Nur die HDMI-Leitung habe
ich direkt durch eine entsprechend große Öffnung in der
Rückwand geführt, denn wer möchte denn schon solch einen
fummeligen HDMI-Stecker anlöten? Die Durchgangsöffnung ist mit einem
passend zugeschnittenen Schaumstoffklotz verstopft, damit die vorgesehene
Luftströmung im Gehäuse nicht durcheinanderkommt. Und wer von den
RasPi-Entwicklern ist eigentlich auf die gloreiche Idee gekommen, das
FBAS-Signal auf die Aussenhülle des vierpoligen Klinkensteckers zu
legen, und den Masseanschluß auf einen der Ringe? Da brauche ich mich
ja nicht mehr zu wundern, warum bei meinem vorherigen QRP-PC das Audiosignal
so (vom Bildschirminhalt abhängig) verbrummt ist!
|
 |
Die restlichen drei Anschlussplatinchen sind hinter der Frontplatte montiert:
Eines mit zwei USB-A-Buchsen (rechts, unterhalb des Sicherungshalters und des
Start/Stop-Tasters), ein weiteres mit drei 3mm-LEDs, einem Transistor und ein
paar Widerständen (neben dem Taster), und das letzte Platinchen (mit einer
5mm-LED und einem Vorwiderstand) befindet sich auf der linken Seite neben dem
Sicherungshalter und dem Netzschalter. Das graue Kästchen rechts mit den
vielen Zuleitungen ist übrigens im realen Aufbau nicht vorhanden.
Stattdessen befindet sich hier ein Knäuel von wild verdrahteten
Steckverbindern → Es wäre ein zu großer Aufwand gewesen,
das "realitätsnah" abzubilden ...
|
Der Aufbau
|
Beim Entwurf des Gehäuses (und den Überlegungen, welche Teile
miteinander verleimt, und welche verschraubt werden) zeichnete sich schon ab,
daß das Gerät eine "ziemlich verbaute Kiste" werden
würde, bei dessen Aufbau die Reihenfolge der Verbindung der Elemente
wichtig wäre, um die entsprechenden Schrauben noch erreichen zu
können.
|
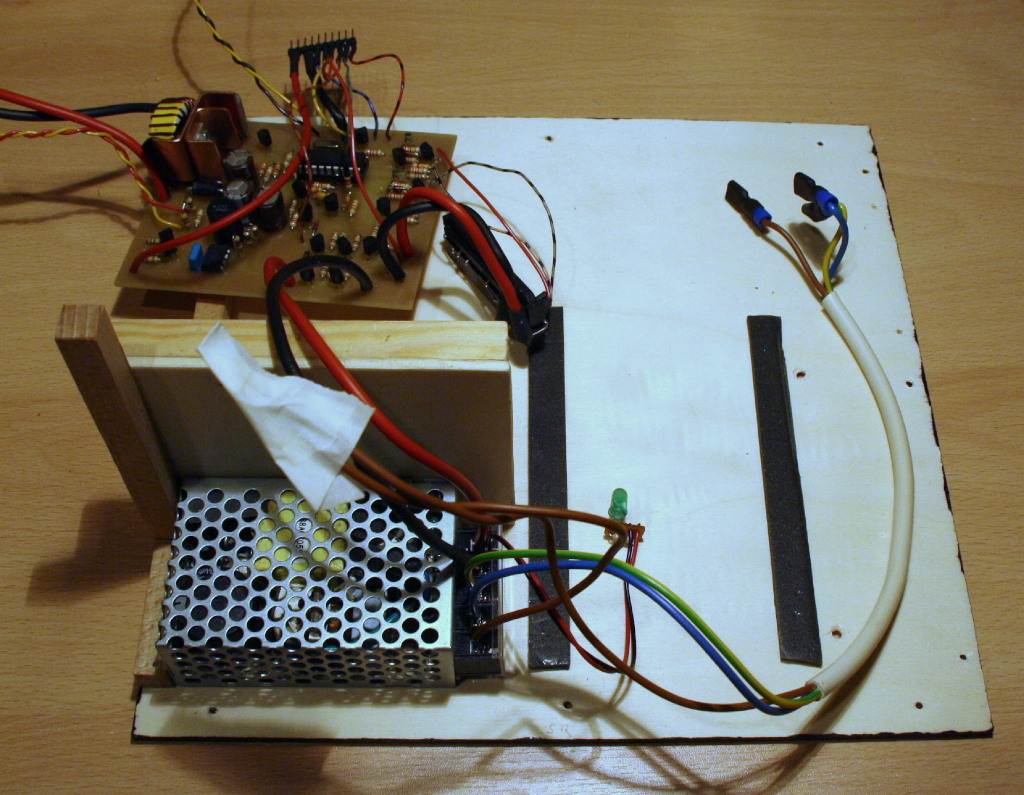 |
Der Aufbau beginnt mit dem Netzteil, welches an die Trennwand zum
"Akku-Bereich" geschraubt wird, denn nach dem Einbau des Akkus
sind diese Schrauben nicht mehr zu erreichen. Außerdem muss nun das
Steuerungsboard (mit seinen schon montierten Leitungen und Temperaturfühlern),
der Netzanschuß, und die "5V-Netzteil"-LED am Netzteil
angschlossen werden, da die Schraubklemmen des Netzeils nach Einbau der
Trennwand zum hinteren Teil verdeckt sind. Die beiden sichtbaren
"Lagerungsstreifen" für die Notebook-Festplatte können
auch später aufgeklebt werden.
|
|
 |
Im zweiten Schritt wird der Akku eingebaut, und die Trennwand zum hinteren
Teil des Gehäuses montiert, an der die Führungsprofile für die
Steuerungsplatine angeschraubt sind. In diesem Schritt kann auch der
Temperaturfühler des "5V→13.8V"-Spannungswandlers am Akku
(mit etwas Klebeband) befestigt werden. Der Fühler sorgt dafür,
daß die Ladespannung des Akkus um etwa 30mV (5mV pro Zelle) pro Grad
Temperaturerhöhung reduziert wird. Der zweite Temperaturfühler der
Steuerungsplatine sollte in der Nähe der Luftlöcher der Trennwand
positioniert werden, denn dieser dient zu Drehzahlregulierung des Lüfters.
Das Aufstecken beider Akku-Anschlüsse ist zu diesem Zeitpunkt
nicht ratsam, da dadurch der "12V→5V"-Spannungswandler
und der Controller aktiviert würde, was bei den vielen, noch nicht
verschalteten Anschlüssen des Steuerungsboards zu unvorhersehbaren
Effekten führen könnte.
|
|
 |
Spätestens jetzt sollten die beiden Schaumstoffstreifen
(Lagerung/Dämpfung der Festplatte), die auf den vorherigen Bildern
sichtbar sind, aufgeklebt werden, damit die Festplatte und der RasPi montiert
und verkabelt werden können. Außerdem wird die Bodenplatte
mit der Vierkantleiste verschraubt, auf der die erste Platine mit den
Steckverbindern (Netzwerk, Keyboard, Maus, Audio und FBAS) ihren Platz findet,
und an der später die Rückwand angeschraubt wird. Nun kann auch
der Keyboard/Maus-Adapter mit seinen Steckverbindern verkabelt werden, und
die Verbindung zur Netzwerkbuchse hergestellt werden. Für die
Netzwerk-Leitung habe ich Einzelleitungen verwendet, um sie
"ordnungsgemäß" miteinander verdrillen zu können.
Notfalls ließe sich (bei dieser kurzen Strecke) auch ein Stück
Flachbandkabel verwenden.
|
|
 |
In diesem Schritt wird der Lüfter an die Seitenwand geschraubt, wobei
sich ein paar kleine Schaumstoff-Pads (als "Unterlegscheibchen")
zur Geräuschdämpfung als nützlich erwiesen haben. Dann wird die
Seitenwand verschraubt und die Frontplatte mit den Bedienelemten und
Zusatzplatinchen versehen. Die entsprechenden Zuleitungen werden auf korrekte
Längen gekürzt und mit Steckverbindern versehen. Die Zusatzplatine
mit den beiden USB-Buchsen wird auf der entsprechenden Vierkantleiste montiert
und die Leiste im Gehäuserahmen eingepasst. Auch die Zuleitungen zur
XLR-Buchse (externer 12V-Eingang und Kommunikationsbus) dürfen zur
Längenanpassung schon einmal "probeliegen".
|
|
 |
Im vorletzten Schritt werden die zweite Seitenwand und der (schmale)
waagerechte Teil des Deckels mit dem Gehäuserahmen verschraubt, die
XLR-Zuleitung durch die entsprechende Bohrung in der Rückwand gefädelt,
und auch die Rückwand verschraubt. Auch die HDMI-Leitung wird jetzt durch
die Rückwand gefädelt, mit dem RasPi verbunden, und die Öffnung
mit dem zugeschnittenen Schaumstoffklotz verstopft. Nun können die internen
Steckverbinder miteinander verbunden, und somit die interne Verkabelung
vollendet werden. Da nun alle Leitungen (hoffentlich korrekt) miteinander
verbunden sind, können jetzt auch die beiden Anschlüsse am Akku
gesteckt, und die Frontplatte verschraubt werden. Nach einem kurzen
Funktionstest wird als letzter Schritt der Deckel aufgelegt und vergeschraubt.
|
|
 |
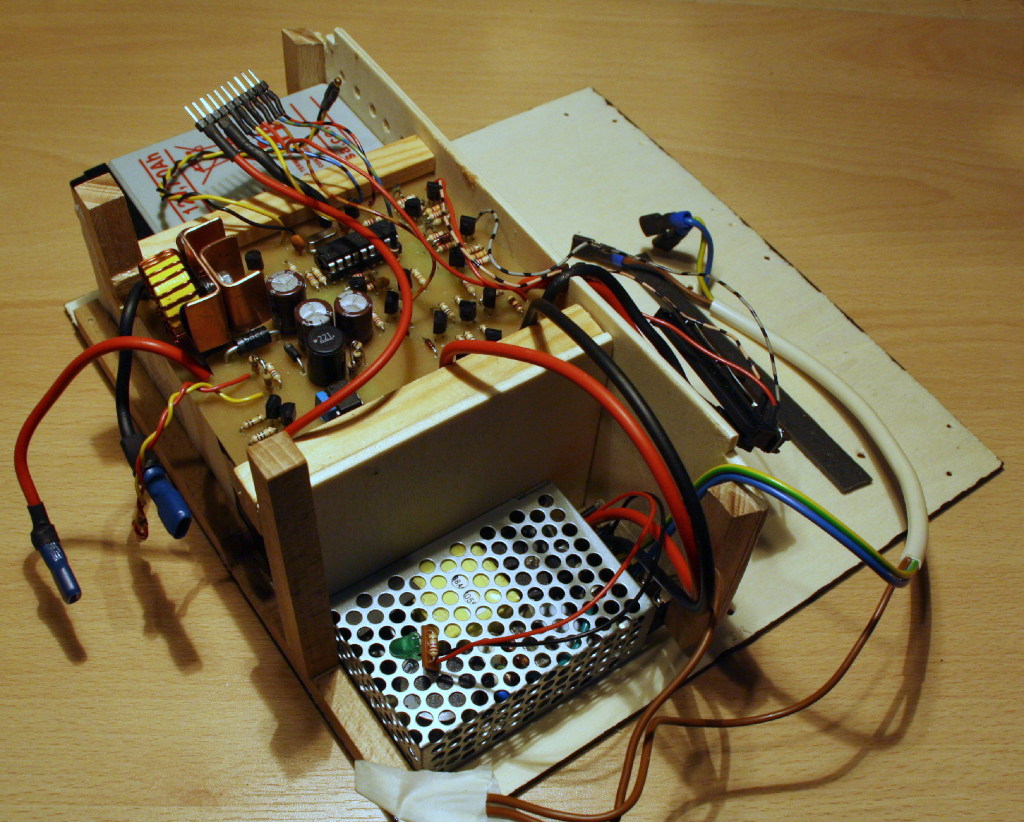
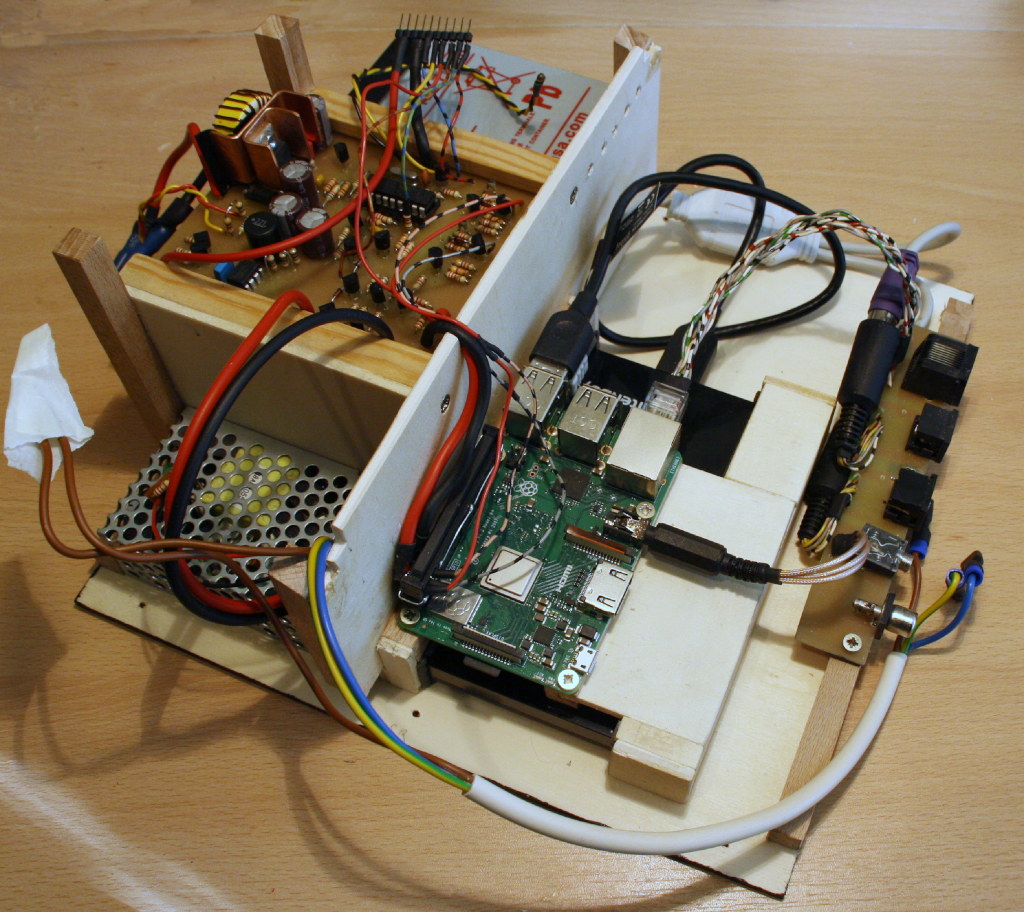
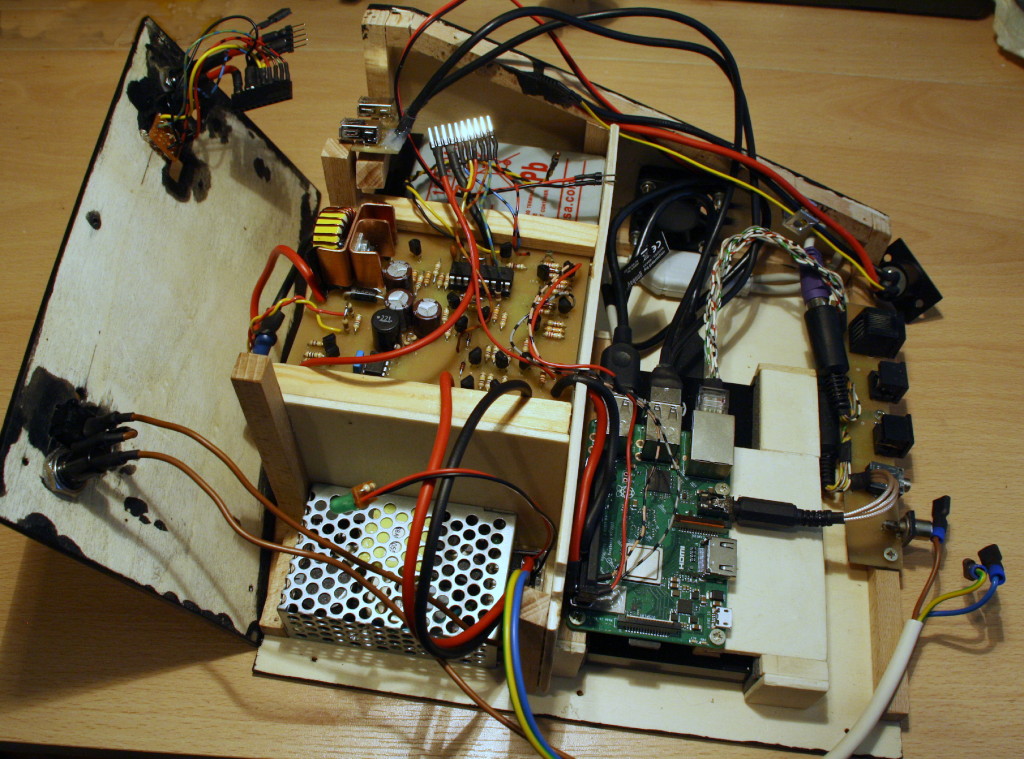
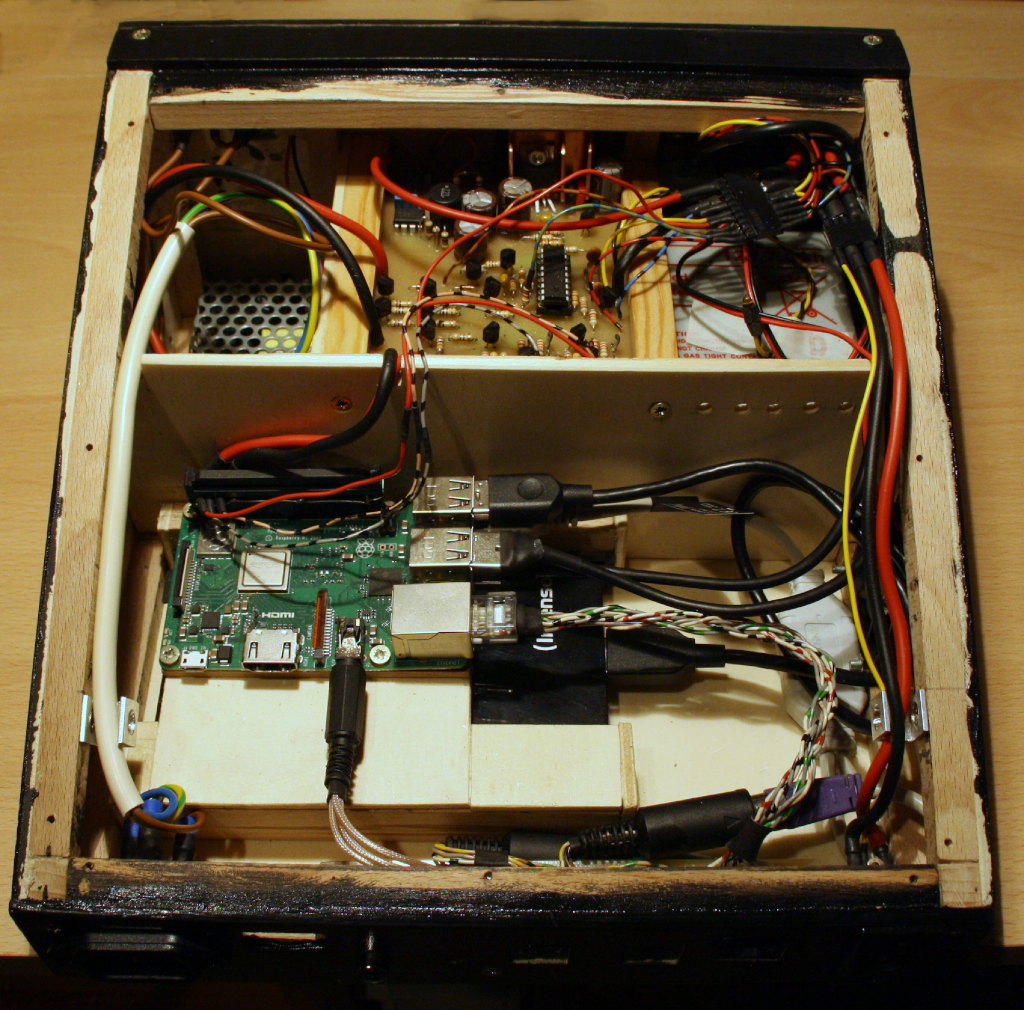
Das nebenstehende Bild verdeutlicht die platzsparende Unterbringung des
"Mini-PCs". Die Rechenleistung eines RasPi ist natürlich
nicht mit einem aktuellen PC vergleichbar, aber für meinen Bedarf
(hauptsächlich Programmierung und Schaltungsentwurf) durchaus ausreichend.
Der Stromverbrauch beträgt etwa 12-15W, was auch einen Akku-Betrieb
ohne Netzversorgung für einige Stunden gewährleisten sollte.
|
Die Firmware des Controllers
|
Die Firmware des Controllers dient hauptsächlich der Kommunikation
mit dem RasPi und dem "Eindraht-Kommunikationsbus". Außerdem
sind einige Funktionen zum Ein- und Ausschalten des RasPi, die Echtzeituhr,
eine Lüftersteuerung, und einige Timer implementiert. Die eigentliche
Steuerung des Systems erfolgt großteils vom RasPi aus.
Das Einschalten des Systems kann auf verschiedene Weisen erfolgen: |
|
—
|
Einschalten der Netzversorgung: Die dadurch anliegende Spannung aus dem
Netzteil wird durch die Firmware detektiert, und die
"Startup"-Phase eingeleitet, die etwa zwei Minuten dauert, und
durch ein Blinken (kurz an, lang aus) der Staus-LED signalisiert wird.
Hierbei wird der RasPi mit Betriebsspannung versorgt, und die
I2C-Schnittstelle aktiviert. Erfolgt eine Kommunikation mit
dem RasPi, wird die "Startup"-Phase vorzeitig beendet. Am Ende
der "Startup"-Phase leuchtet die Status-LED dauernd. Ist die
Akkuspannung beim Einschalten der Netzversorgung zu gering, wird der
Start verzögert, bis der Akku so weit geladen ist, daß die
Ladung des Aukkus ausreicht, um das System bei einem Netzausfall wieder
herunterfahren zu können.
Um zwar die Netzversorgung einzuschalten, jedoch ein Starten des Systems zu verhindern, kann die Taste gedrückt, während des Einschaltens der Netzversorgung gehalten, und danach wieder losgelassen werden. Dieser Modus kann z.B. zum Laden des Akkus verwendet werden, ohne daß dabei der RasPi läuft und Strom verbraucht. |
|
—
|
Betätigung des Tasters (1-2s): Auch in diesem Fall wird die
"Startup"-Phase eingeleitet und der RasPi mit Spannung versorgt,
jedoch läuft das System mit Hilfe der 12V-(Akku)-Versorgung, was am Ende
der "Startup"-Phase durch ein gleichmäßiges Blinken
der Status-LED angezeigt wird. Ist die Akkuspannung zu gering, wird ein
Start verhindert.
|
|
—
|
Einschaltbefehl vom "Eindraht-Kommunikationsbus": Auf diese Weise
kann das Starten des Systems durch einen anderen Microcontroller (z.B. mit
Fernbedienungsempfänger oder Bewegungsmelder) ausgelöst werden.
|
|
—
|
Timer: Sowohl über den I2C-Bus (RasPi),
als auch den "Eindraht-Kommunikationsbus" kann ein (Sleep-)Timer
(1-65535 Minuten) gesetzt werden, der nach dem Abschalten des Systems aktiv
wird, und nach Ablauf der vorgegebenen Zeit das System wieder startet.
|
|
Auch das Ausschalten des Systems kann auf verschiedene Weisen ausgelöst
werden:
|
|
—
|
Abschaltung der Netzversorgung: Der Wegfall der 5V aus dem Schaltnetzteil
wird vom Controller detektiert, und führt nach ein paar Sekunden (damit
ein kurzzeitiges "Wackeln" der Netzspannung keine Abschaltung
auslöst) zur Einleitung der "Shutdown"-Phase, die etwa eine
Minute dauert, und durch ein Blinken (lang an, kurz aus) der Status-LED
signalisiert wird. Nach Ablauf der Zeit wird die Stromversorgung des RasPi
abgeschaltet, und die Status-LED verlischt.
|
|
—
|
Betätigung des Tasters (1-2s): Auch in diesem Fall wird die
"Shutdown"-Phase eingeleitet.
|
|
—
|
Absinken der Akkuspannung: Verringert sich die Akkuspannung unter einen
Wert, der eine genügende Ladung für ein sicheren Akku-Betrieb
signalisiert, wird automatisch die "Shutdown"-Phase eingeleitet.
|
|
—
|
Kommunikations-Timeout: Findet für etwa eine Minute keine Kommunikation
mit dem RasPi über den I2C-Bus statt, wird davon ausgegangen,
daß das RasPi-System "hängengeblieben" ist, und die
"Shutdown"-Phase wird eingeleitet. In Kombination mit dem
"Sleep"-Timer lässt sich mit dieser Funktion eine Art
"Watchdog" realisieren, der bei einem "Hängen" des
Systems einen Neustart auslöst.
Diese Funktionalität kann durch Betätigung des Tasters (1-2s) während der "Startup"-Phase abgeschaltet werden, um z.B. Modifikationen an den Programmen/Skripten vornehmen zu können, die für die I2C-Kommunikation auf dem RasPi notwendig sind. |
|
—
|
Abschaltbefehl vom "Eindraht-Kommunikationsbus": Auf diese Weise
kann das Herunterfahren des Systems durch einen anderen Microcontroller
ausgelöst werden.
|
|
—
|
Abschaltbefehl über den I2C-Bus (vom RasPi): Auch vom RasPi
kann das Herunterfahren des Systems ausgelöst werden.
|
Die Software auf dem RasPi
|
Die Kommunikation zwischen Controller und RasPi erfolgt über den
I2C-Bus des RasPi, dessen Signale (GPIO2/SDA1 und GPIO3/SCL1) auf
dem 40poligen Stecker zugänglich sind. Wenn der I2C-Bus im
"raspi-config" aktiviert wurde, können Programme mit Hilfe des
Devices "/dev/i2c-1" auf diesen Bus zugreifen und darüber
Daten senden und empfangen. Damit es keine Zugriffskonflikte auf dieses Device
gibt, wenn verschiedene Programme mit dem Controller kommunizieren
möchten, habe ich mich entschlossen, ein
Daemon-Programm
zu verwenden, welches die direkte Kommunikation mit dem Controller
übernimmt. Dieses Programm kann von anderen Programmen über einen
UNIX Domain Socket
angesprochen werden, um Befehle an den Controller zu senden oder Informationen
vom Controller abzufragen. Während das Programm läuft, wird
regelmäßig der Status des Controllers abgefragt, um u.a.
festzustellen, ob dieser die "Shutdown"-Phase gestartet hat, und das
System heruntergefahren werden soll. Dieser Umstand wird durch die Beendigung
des Daemons mit einem speziellen Exitcode (2) signalisiert, der von einem
entsprechenden Shellscript detektiert werden kann, welches dann das
Herunterfahren des Systems anstoßen kann. Durch die ständige
Statusabfrage stellt dieses Programm auch sicher, daß eine
regelmäßige Kommunikation mit dem Controller stattfindet, und
kein Kommunikations-Timeout auftritt. Wie aus der
Befehlszeile ersichtlich, kann der Daemon optional auch noch einige weitere
Funktionen übernehmen:
|
|
raspipwrd [-t] [-f] [-w] [-l <logfile>] -d <device>
|
|
-d <device>
|
Hiermit wird das Device angegeben, über das die
I2C-Kommunikation erfolgen soll. In diesem Falle also
"-d /dev/i2c-1". Dieser Parameter muss in jedem Fall angegeben werden.
|
|
-f
|
Mit dieser optionalen Angabe wird das Programm angewiesen, die CPU-Temperatur
des RasPi auszulesen, und bei Bedarf (>50°C) den Lüfter zu
beschleunigen.
|
|
-l <logfile>
|
Diese optionale Angabe bewirkt, daß jegliche Aktion in der mit
"logfile" angegebenen Datei (z.B.
"/var/log/local/pwrstat.log") protokolliert wird.
|
|
-t
|
Mit dieser Option wird das Programm angewiesen, beim Start des Programms
die Echtzeituhr aus dem Controller zu lesen. Erscheint der gelesene Wert
plausibel (<30 Tage später als die aktuellen Systemzeit)
wird die Systemzeit entsprechend gesetzt. Das Setzen der Systemzeit ist
jedoch nur möglich, wenn das Daemon-Programm mit entsprechenden
Rechten (→ als "root") gestartet wird. Beim Beenden des
Programms wird auf jeden Fall die aktuelle Systemzeit in den Controller
geschrieben.
|
|
-w
|
Diese Option bewirkt, daß beim Programmstart der
Sleep-Timer des Controllers auf zwei Minuten gesetzt wird,
und die Befehle des RasPi zur Änderung diese Timers nicht direkt an den
Controller weitergeleitet werden. Stattdessen werden die neuen Werte in einer
Variablen gespeichert, die erst bei der Beendigung des Programms an den
Controller übertragen wird. Dieses Verfahren bewirkt, daß
bei einem "Hängen" des Systems ein
Kommunikations-Timeout auftritt, der Controller die
"Shutdown"-Phase startet, das System abschaltet, und nach zwei
Minuten erneut startet.
|
|
Um auch als "Benutzer" (oder entsprechendes Shellscript) mit dem
Controller kommunizieren zu können, existiert ein zweites Programm,
welches entsprechende Anfragen an den (ständig laufenden) Daemon stellt,
und dessen Daten ausgibt. Die möglichen Befehlszeile dieses
(Client-)Programms sind:
|
|
raspipwr_cli -s
|
Mit diesem Befehl werden die aktuellen Statusbits des Controllers angefragt.
Die Antwort besteht aus fünf Ziffern, die "0" oder
"1" sein können, durch Kommata getrennt sind, und die
Zustände von "Netzversorgung", "Akkuversorgung",
"Zu geringe Akkuspannung", "Shutdown-Phase aktiviert",
und "Von Timer gestartet worden" anzeigen. Eine Ausgabe von z.B.
"1,1,0,0,0" bedeutet, daß die Stromversorgung sowohl vom
Netzteil, als auch vom Akku möglich ist, die Akkuspannung genügend
hoch ist, kein "Shutdown" eingeleitet wurde, und das System nicht
vom Timer gestartet wurde. Diese Art der Darstellung ist zwar für einen
Benutzer etwas schwer zu interpretieren, aber recht gut geeignet, um von einem
Shellscript verarbeitet zu werden.
|
|
raspipwr_cli -v
|
Dieser Befehl fragt einige Messwerte des Controllers ab.
Die Antwort besteht aus vier Werten, die durch Kommata getrennt sind, und die
Messwerte von von "Spannung vom Netzteil", "Spannung des
Akkus", "Betriebsspannung des Contollers", und "Temperatur
im Gehäuse" anzeigen. Eine "normale" Ausgabe wäre
z.B. "5.5,13.7,5.4,22.6".
|
|
raspipwr_cli -o
|
Dieser Befehl dient zur Einleitung der "Shutdown"-Phase. Da dieser
Befehl keine Werte liefert, besteht die Antwort nur aus "Done" oder
einer Fehlermelung. Kurz nach der erfolgreichen Ausführung sollte der
Deamon-Prozess den neuen Zustand des Controllers detektieren, und sich mit dem
Exit-Code "2" beenden. Das Skript, welches den Daemon gestartet hat,
erkennt diesen Umstand, und leitet das Herunterfahren des Systems ein.
|
|
raspipwr_cli -w <val>
|
Hiermit wird der "Sleep"-Timer des Controllers auf dem Wert
"val" (0 bis 65535) gesetzt. Das ist die Zeit in Minuten, nach der
der Controller nach dem Shutdown das System wieder aktiviert. Ein Wert von
"0" schaltet den Timer ab. Da auch dieser Befehl keinen Wert ausgibt,
besteht die Antwort nur aus "Done" oder einer Fehlermelung.
|
|
raspipwr_cli -f <val>
|
Dieser Aufruf setzt die Geschwindigkeit des Lüfters auf dem Wert
"val" (0 bis 255). Damit kann z.B. bei steigender CPU-Temperatur
der Luftstrom zu besseren Kühlung erhöht werden. Da der Controller
schon eine Drehzahl aus der Gehäusetemperatur selber berechnet, kann die
Drehzahl mit diesem Befehl nur erhöht und nicht verringert werden. Die
Reduktion der Drehzahl erfolgt langsam und automatisch, bis auf den vom
Controller berechneten Wert. Daher ist es ratsam, diesen Befehl alle paar
Minuten (bei Bedarf) zu wiederholen.
|
|
raspipwr_cli -b <channel>
|
Hiermit wird eine (zeitbegrenzte) Aufzeichnung und Ausgabe der Daten auf dem
"Eindraht-Kommunikationsbus" angefordert. Damit die Daten von
ggf. mehreren anfragenden Programmen/Skripten nicht durcheinanderkommen und
eindeutig zugeordnet werden können, ist die Angabe einer Kanalnummer
("channel") notwendig. Diese Kanalnummer wird beim ersten Aufruf
mit der Kanalnummer "0" neu vergeben, und ist Bestandteil der
Antwort. Bei weiteren Aufrufen (zur Abfrage der gepufferten Daten) ist dann
die in der letzten Antwort angegebene Kanalnummer zu verwenden. Die Antwort
auf diesen Befehl besteht aus der Kanalnummer, der Anzahl der folgenden
Datenbytes, und ggf. den hexadezimalen Datenbytes. Eine Antwort auf den
ersten Aufruf (mit der Kanalnummer 0) könnte z.B. lauten
" 4, 0" was bedeutet, daß beim nächsten Aufruf die
Kanalnummer 4 zu verwenden ist, und daß derzeitig keine Daten vorliegen.
Die Antwort auf den nächsten Aufruf (diesmal mit der Kanalnummer 4)
könnte z.B. lauten " 4, 2,3A,C5", was bedeutet, daß
für den Kanal 4 zwei Bytes, nämlich "3A" und "C5"
aufgezeichnet wurden. Da nicht beliebig viele Datenbytes in dem Antwortstring
enthalten sein können, ist es ratsam, nach einem Aufruf, der Datenbytes
enthielt, den Aufruf zu wiederholen, bis keine Daten mehr in der Antwort
enthalten sind. Damit nicht Unmengen von Daten gepuffert werden müssen,
ist diese Funktionalität zeitlich begrenzt: Werden eine Minute lang
keine Anfragen für einen Kanal gestellt, wird der entsprechende Kanal
gelöscht, und weitere Aufrufe für diesen Kanal mit einer
Fehlermeldung beantwortet.
|
|
raspipwr_cli -d <data>
|
Dieser Befehl dient dazu, Daten auf dem "Eindraht-Kommunikationsbus"
zu senden. Damit können Daten z.B. zu einem anderen Microcontroller
gesendet werden, der ebenfalls am dem Bus angeschlossen ist. "data"
sind dabei 2 bis 7 zu sendende Datenbytes, die als Hexadezimalwerte (also
4-14 Zeichen) anzugeben sind.
|
Das Material
|
Das hier angebotene Material unterliegt der Creative Commons Lizenz
"CC BY-NC-SA".
|
|
In diesem Archiv befinden sich die Dateien der beiden
KiCad-Projekte
"raspipwr" (Controller mit Spannungs- und Pegelwandlern) und
"raspicon" (kleine Zusatzplatinen für die
Außenanschlüsse).
|
|
|
Diese Datei enthält die
Blender-Datei, mit der
ich den Aufbau simuliert habe. Die verschiedenen Bestandteile (Platinen,
Leitungen, etc.) befinden sich in verschiedenen Layern, was ein
Ein- und Ausblenden einzelner Gruppen erleichtert.
|
|
|
In dieser Datei befindet sich das Hexfile, welches zur Programmierung des
Microcontrollers auf dem Steuerungsboard notwendig ist.
|
|
|
In diesem Archiv befindet sich der Quellcode, um die Firmware (→Hexfile)
für den Controller herzustellen. Diese Dateien werden nur benötigt,
wenn Änderungen an der Firmware des Controllers vorgenommen werden
sollen. Zur Herstellung eines neuen Hexfiles ist die Installation des Pakets
"gputils" z.B. aus dem "Raspbian"-Repository (oder von
gputils.sourceforge.net
) notwendig.
|
|
|
Diese Archiv enthält den Quellcode der Programme, die auf dem RasPi laufen.
Der Shell-Befehl "make" in dem (ggf. temporären) Verzeichnis, in dem
dieses Archiv entpackt wurde, bewirkt die Erzeugung der Programme
raspipwrd und raspipwr_cli.
Diese beiden Programme sollten zusammen mit dem Shellscript
pwr_ctrl.sh nach
"/usr/local/bin/" kopiert werden, um im System implementiert zu
werden. Das Shellscript dient dazu, "raspipwrd" mit entsprechenden
Befehlszeilen-Parametern zu starten, und das System bei Bedarf
herunterzufahren. Damit dieses Script bei jedem Systemstart ausgeführt
wird, sollte die Zeile "/usr/local/bin/pwr_ctrl.sh &"
in "/etc/rc.local" eingetragen werden (Das "&" am Ende
der Zeile nicht vergessen!). In "pwr_ctrl.sh" ist das Verzeichnis
"/var/log/local/" für die Logdatei der Programme vorgesehen.
Da dieses Verzeichnis nicht bei allen Systemen vorhanden ist, sollte es
ggf. neu angelegt (oder das Script entsprechend geändert) werden.
Damit die Logdatei im Laufe der Zeit nicht übermäßig groß
wird, ist eine entsprechende Eintragung im "logrotate"
empfehlenswert.
|
Hinweise für Nachbauwillige
|
Wer diese Konstruktion nachbauen möchte, sollte über etwas Kenntnisse
der Herstellung einseitiger Leiterplatten, der Programmierung von
Mikrocontrollern, und etwas handwerkliches Geschick verfügen.
Es handelt sich hierbei nicht um einen Bausatz, sondern eher um eine
Anregung für eigene Konstruktionen. Alles, was ich dazu anbieten kann,
befindet sich auf dieser Seite, d.h. Nachfragen nach fertigen Geräte
oder Bausätzen sind zwecklos → Ich "produziere"
ausschliesslich für den Eigenbedarf.
|
Für die Funktionalität und Nachbausicherheit dieser Konstruktion kann ich keinerlei Verantwortung übernehmen. Ich verkaufe weder fertige aufgebaute Schaltungen, noch komplette Geräte oder Bausätze. Eine kommerzielle Verwertung des hier angebotenen Materials (Schaltpläne, Layouts, 3D-Modelle, Quell- und Hexcodes) oder auch Teilen davon ist nur mit meiner ausdrücklichen Genehmigung zulässig.
Startseite Hardware Rechtliches Kontakt